 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOVESe: MOVablE and Moving LiDAR Scene Segmentation with Improved Navigation in Seg-label free settings
Paper and Code
Jun 26, 2023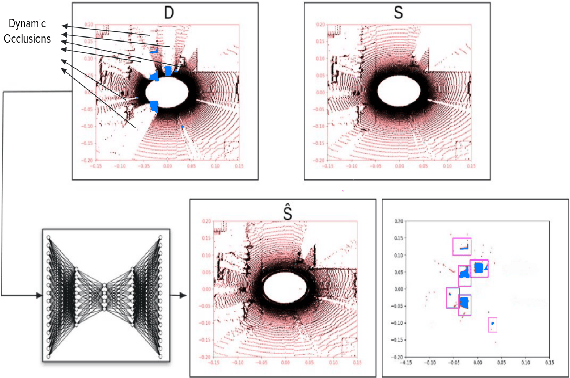

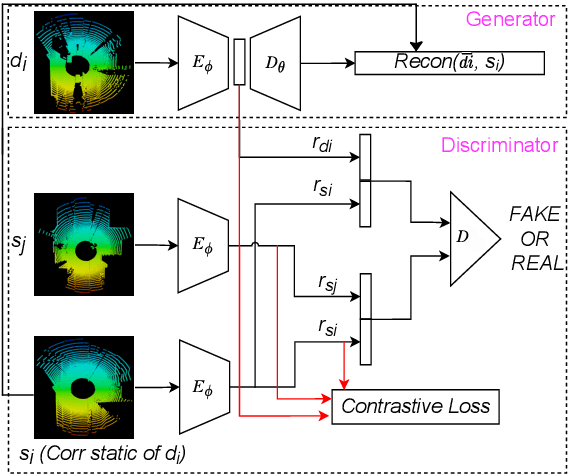

Accurate detection of movable and moving objects in LiDAR is of vital importance for navigation. Most existing works focus on extracting and removing moving objects during navigation. Movable objects like pedestrians, parked vehicles, etc. although static may move in the future. This leads to erroneous navigation and accidents. In such cases, it becomes necessary to detect potentially movable objects. To this end, we present a learning-based approach that segments movable and moving objects by generating static parts of scenes that are otherwise occluded. Our model performs superior to existing baselines on static LiDAR reconstructions using 3 datasets including a challenging sparse industrial dataset. We achieve this without the assistance of any segmentation labels because such labels might not always be available for less popular yet important settings like industrial environments. The non-movable static parts of the scene generated by our model are of vital importance for downstream navigation for SLAM. The movable objects detected by our model can be fed to a downstream 3D detector for aiding navigation. Though we do not use segmentation, we evaluate our method against navigation baselines that use it to remove dynamic objects for SLAM. Through extensive experiments on several datasets, we showcase that our model surpasses these baselines on navigation.