 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphoMove: Bi-Modal Path Planner with MPC-based Path Follower for Multi-Limb Morphogenetic UAV
Paper and Code
Jul 12, 2024
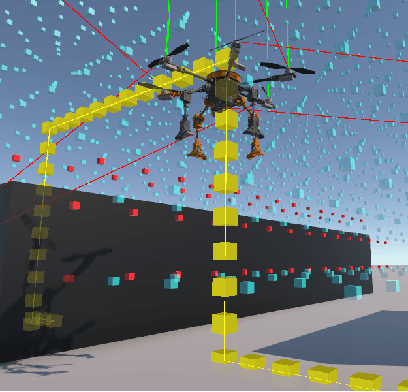


This paper discusses developments for a multi-limb morphogenetic UAV, MorphoGear, that is capable of both aerial flight and ground locomotion. A hybrid path planning algorithm based on A* strategy has been developed enabling seamless transition between air-to-ground navigation modes, thereby enhancing robot's mobility in complex environments. Moreover, precise path following is achieved during ground locomotion with a Model Predictive Control (MPC) architecture for its novel walking behaviour. Experimental validation was conducted in the Unity simulation environment utilizing Python scripts to compute control values. The algorithms' performance is validated by the Root Mean Squared Error (RMSE) of 0.91 cm and a maximum error of 1.85 cm, as demonstrated by the results. These developments highlight the adaptability of MorphoGear in navigation through cluttered environments, establishing it as a usable tool in autonomous exploration, both aerial and ground-based.