 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonocular Vehicle Self-localization method based on Compact Semantic Map
Paper and Code
May 16, 2018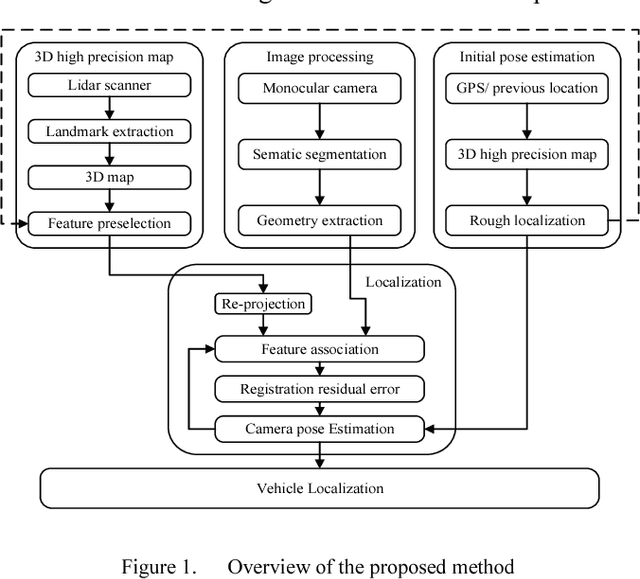
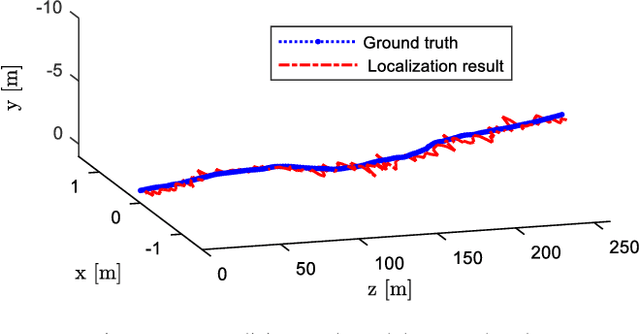
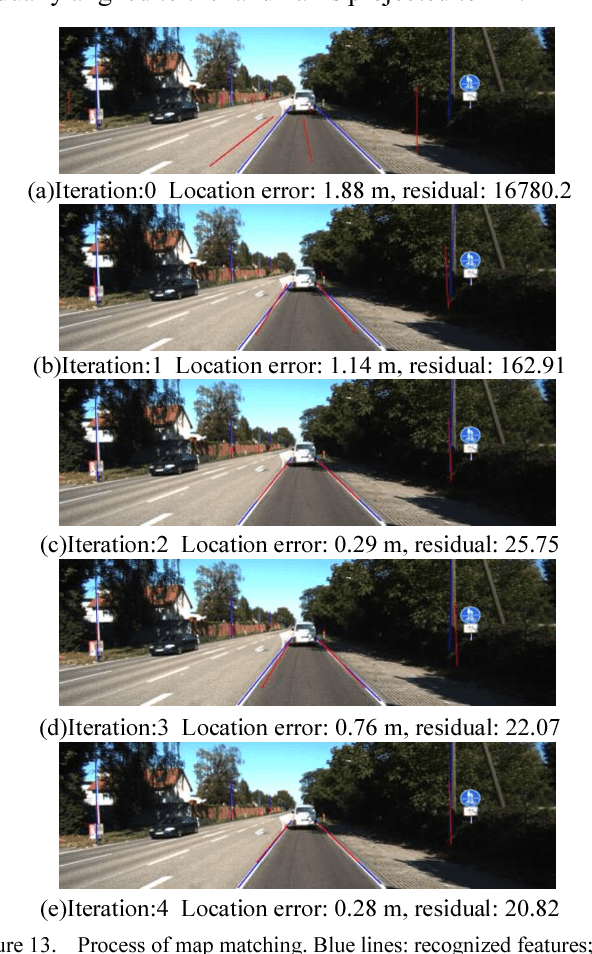
High precision localization is a crucial requirement for the autonomous driving system. Traditional positioning methods have some limitations in providing stable and accurate vehicle poses, especially in an urban environment. Herein, we propose a novel self-localizing method using a monocular camera and a 3D compact semantic map. Pre-collected information of the road landmarks is stored in a self-defined map with a minimal amount of data. We recognize landmarks using a deep neural network, followed with a geometric feature extraction process which promotes the measurement accuracy. The vehicle location and posture are estimated by minimizing a self-defined re-projection residual error to evaluate the map-to-image registration, together with a robust association method. We validate the effectiveness of our approach by applying this method to localize a vehicle in an open dataset, achieving the RMS accuracy of 0.345 meter with reduced sensor setup and map storage compared to the state of art approaches. We also evaluate some key steps and discuss the contribution of the subsystems.