 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModular Neural Network Policies for Learning In-Flight Object Catching with a Robot Hand-Arm System
Paper and Code
Dec 21, 2023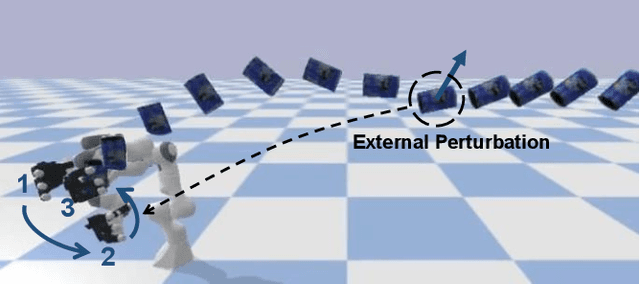
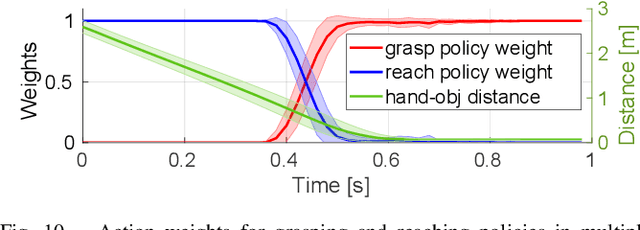
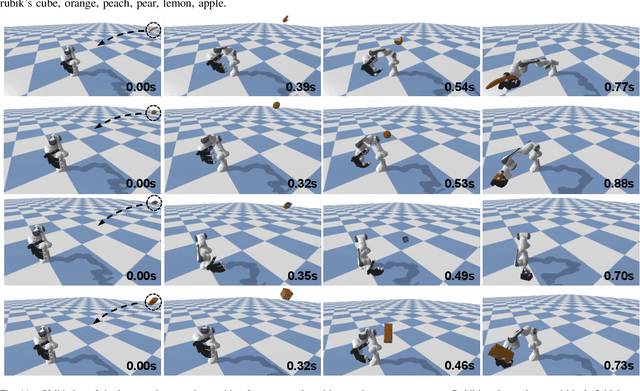
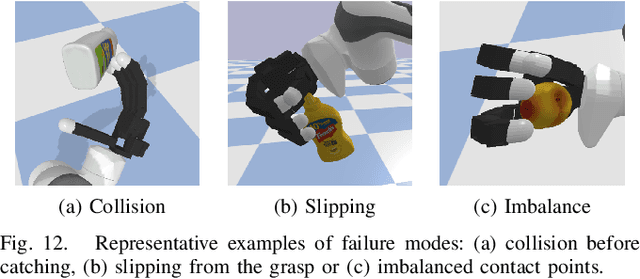
We present a modular framework designed to enable a robot hand-arm system to learn how to catch flying objects, a task that requires fast, reactive, and accurately-timed robot motions. Our framework consists of five core modules: (i) an object state estimator that learns object trajectory prediction, (ii) a catching pose quality network that learns to score and rank object poses for catching, (iii) a reaching control policy trained to move the robot hand to pre-catch poses, (iv) a grasping control policy trained to perform soft catching motions for safe and robust grasping, and (v) a gating network trained to synthesize the actions given by the reaching and grasping policy. The former two modules are trained via supervised learning and the latter three use deep reinforcement learning in a simulated environment. We conduct extensive evaluations of our framework in simulation for each module and the integrated system, to demonstrate high success rates of in-flight catching and robustness to perturbations and sensory noise. Whilst only simple cylindrical and spherical objects are used for training, the integrated system shows successful generalization to a variety of household objects that are not used in training.