 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and interpolation of the ambient magnetic field by Gaussian processes
Paper and Code
Mar 21, 2018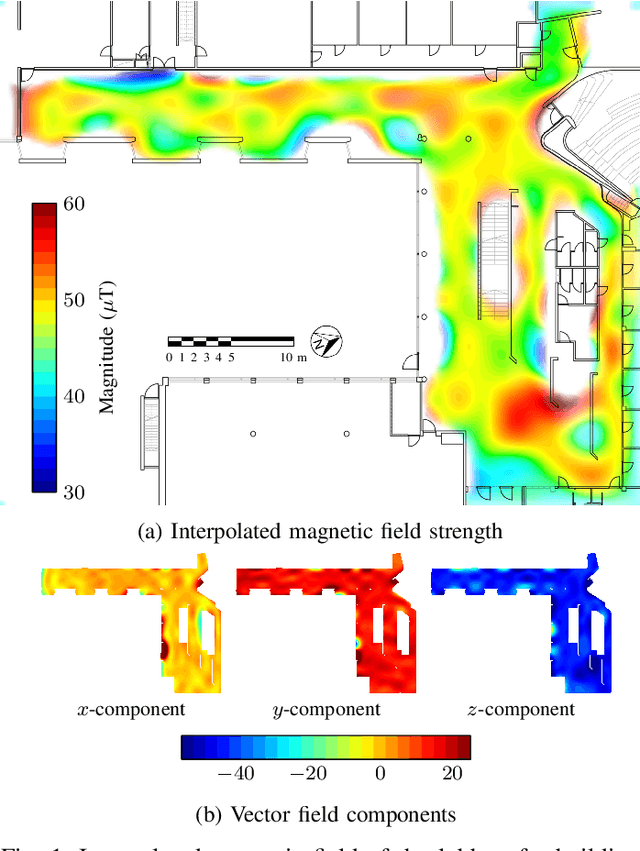
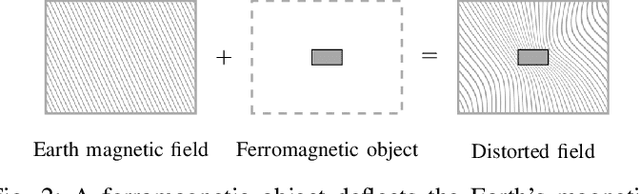
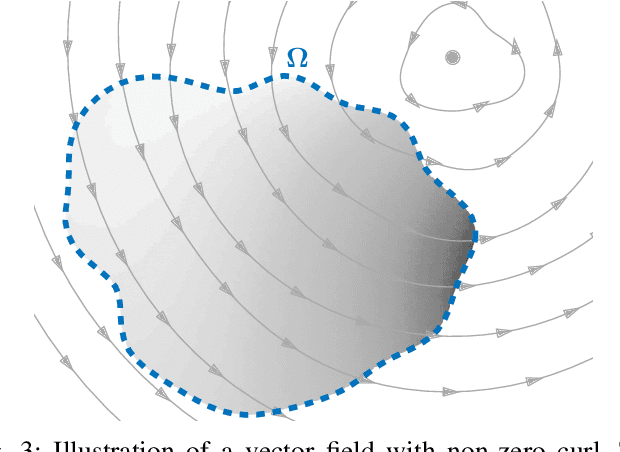
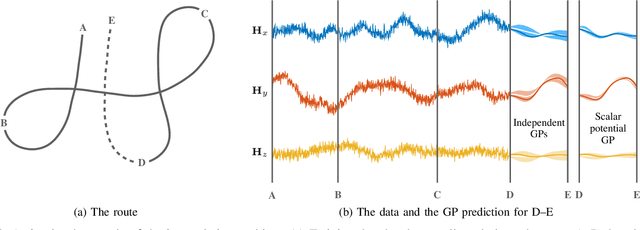
Anomalies in the ambient magnetic field can be used as features in indoor positioning and navigation. By using Maxwell's equations, we derive and present a Bayesian non-parametric probabilistic modeling approach for interpolation and extrapolation of the magnetic field. We model the magnetic field components jointly by imposing a Gaussian process (GP) prior on the latent scalar potential of the magnetic field. By rewriting the GP model in terms of a Hilbert space representation, we circumvent the computational pitfalls associated with GP modeling and provide a computationally efficient and physically justified modeling tool for the ambient magnetic field. The model allows for sequential updating of the estimate and time-dependent changes in the magnetic field. The model is shown to work well in practice in different applications: we demonstrate mapping of the magnetic field both with an inexpensive Raspberry Pi powered robot and on foot using a standard smartphone.