Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Control of Humanoid Robots in Dynamic Environments: iCub Balancing on a Seesaw
Paper and Code
Mar 09, 2018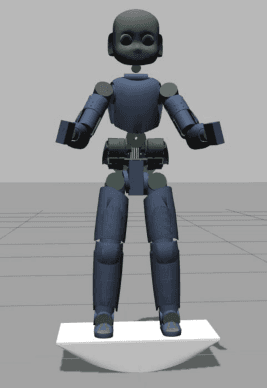
Forthcoming applications concerning humanoid robots may involve physical interaction between the robot and a dynamic environment. In such scenario, classical balancing and walking controllers that neglect the environment dynamics may not be sufficient for achieving a stable robot behavior. This paper presents a modeling and control framework for balancing humanoid robots in contact with a dynamic environment. We first model the robot and environment dynamics, together with the contact constraints. Then, a control strategy for stabilizing the full system is proposed. Theoretical results are verified in simulation with robot iCub balancing on a seesaw.
View paper on