 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMMPTRACK: Large-scale Densely Annotated Multi-camera Multiple People Tracking Benchmark
Paper and Code
Nov 30, 2021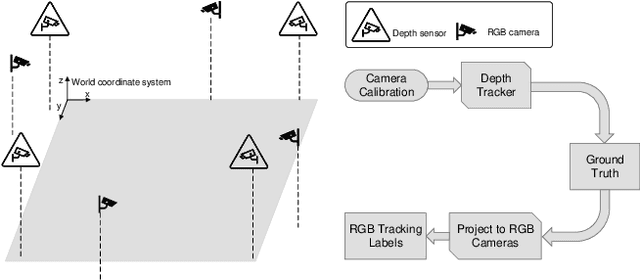
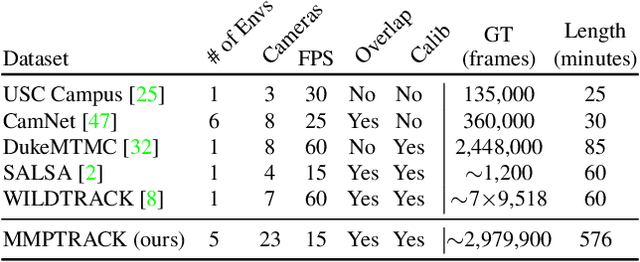
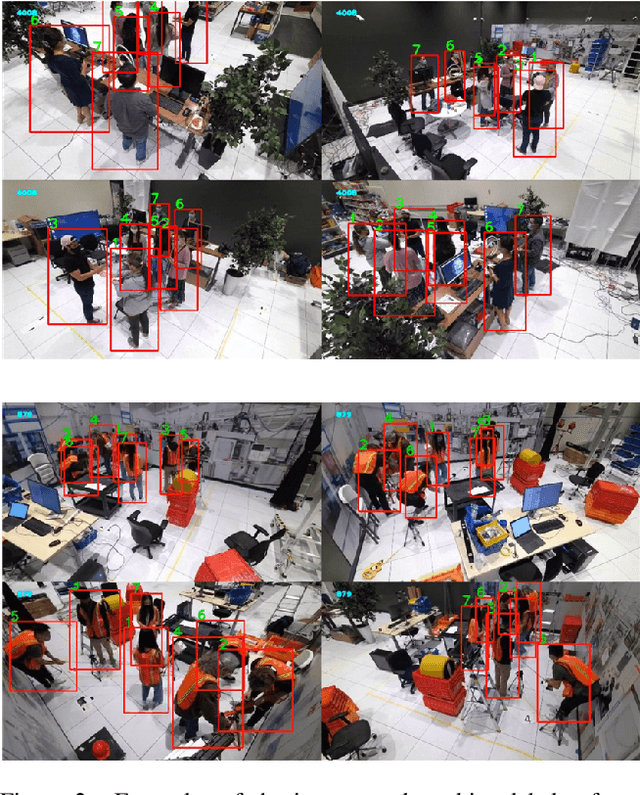
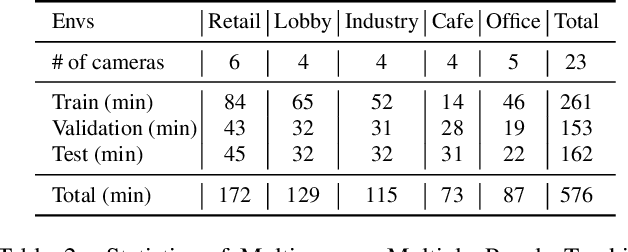
Multi-camera tracking systems are gaining popularity in applications that demand high-quality tracking results, such as frictionless checkout because monocular multi-object tracking (MOT) systems often fail in cluttered and crowded environments due to occlusion. Multiple highly overlapped cameras can significantly alleviate the problem by recovering partial 3D information. However, the cost of creating a high-quality multi-camera tracking dataset with diverse camera settings and backgrounds has limited the dataset scale in this domain. In this paper, we provide a large-scale densely-labeled multi-camera tracking dataset in five different environments with the help of an auto-annotation system. The system uses overlapped and calibrated depth and RGB cameras to build a high-performance 3D tracker that automatically generates the 3D tracking results. The 3D tracking results are projected to each RGB camera view using camera parameters to create 2D tracking results. Then, we manually check and correct the 3D tracking results to ensure the label quality, which is much cheaper than fully manual annotation. We have conducted extensive experiments using two real-time multi-camera trackers and a person re-identification (ReID) model with different settings. This dataset provides a more reliable benchmark of multi-camera, multi-object tracking systems in cluttered and crowded environments. Also, our results demonstrate that adapting the trackers and ReID models on this dataset significantly improves their performance. Our dataset will be publicly released upon the acceptance of this work.