 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMesh Manifold based Riemannian Motion Planning for Omnidirectional Micro Aerial Vehicles
Paper and Code
Feb 20, 2021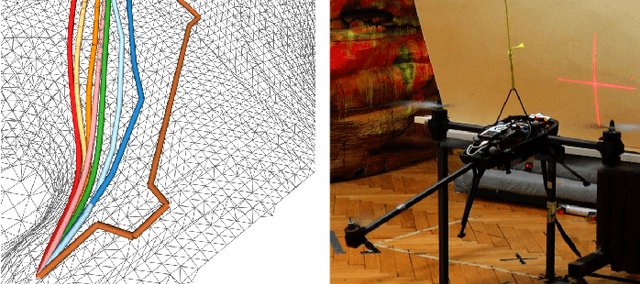
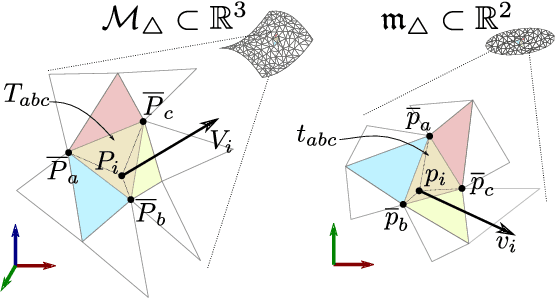
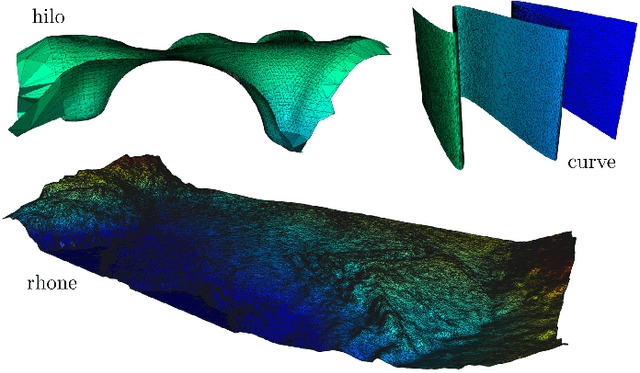
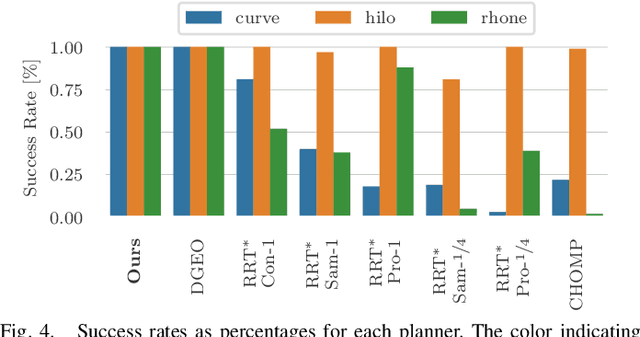
This paper presents a novel on-line path planning method that enables aerial robots to interact with surfaces. We present a solution to the problem of finding trajectories that drive a robot towards a surface and move along it. Triangular meshes are used as a surface map representation that is free of fixed discretization and allows for very large workspaces. We propose to leverage planar parametrization methods to obtain a lower-dimensional topologically equivalent representation of the original surface. Furthermore, we interpret the original surface and its lower-dimensional representation as manifold approximations that allow the use of Riemannian Motion Policies (RMPs), resulting in an efficient, versatile, and elegant motion generation framework. We compare against several Rapidly-exploring Random Tree (RRT) planners, a customized CHOMP variant, and the discrete geodesic algorithm. Using extensive simulations on real-world data we show that the proposed planner can reliably plan high-quality near-optimal trajectories at minimal computational cost. The accompanying multimedia attachment demonstrates feasibility on a real OMAV. The obtained paths show less than 10% deviation from the theoretical optimum while facilitating reactive re-planning at kHz refresh rates, enabling flying robots to perform motion planning for interaction with complex surfaces.