 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMathematical Foundation and Corrections for Full Range Head Pose Estimation
Paper and Code
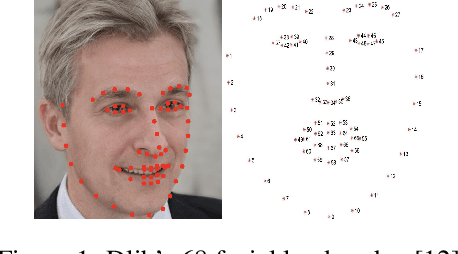
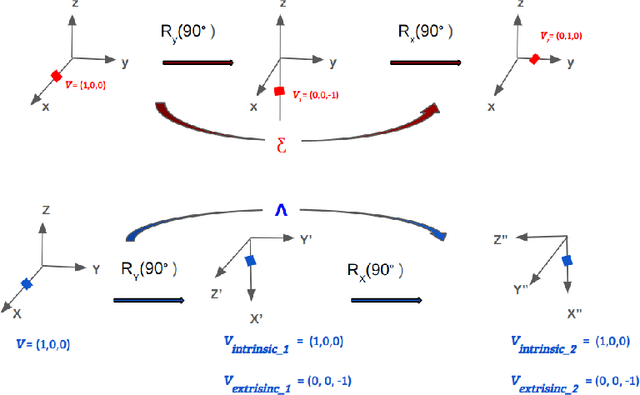
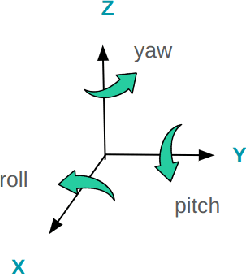
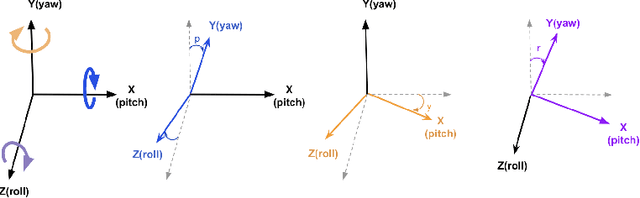
Numerous works concerning head pose estimation (HPE) offer algorithms or proposed neural network-based approaches for extracting Euler angles from either facial key points or directly from images of the head region. However, many works failed to provide clear definitions of the coordinate systems and Euler or Tait-Bryan angles orders in use. It is a well-known fact that rotation matrices depend on coordinate systems, and yaw, roll, and pitch angles are sensitive to their application order. Without precise definitions, it becomes challenging to validate the correctness of the output head pose and drawing routines employed in prior works. In this paper, we thoroughly examined the Euler angles defined in the 300W-LP dataset, head pose estimation such as 3DDFA-v2, 6D-RepNet, WHENet, etc, and the validity of their drawing routines of the Euler angles. When necessary, we infer their coordinate system and sequence of yaw, roll, pitch from provided code. This paper presents (1) code and algorithms for inferring coordinate system from provided source code, code for Euler angle application order and extracting precise rotation matrices and the Euler angles, (2) code and algorithms for converting poses from one rotation system to another, (3) novel formulae for 2D augmentations of the rotation matrices, and (4) derivations and code for the correct drawing routines for rotation matrices and poses. This paper also addresses the feasibility of defining rotations with right-handed coordinate system in Wikipedia and SciPy, which makes the Euler angle extraction much easier for full-range head pose research.