 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMatching Neuromorphic Events and Color Images via Adversarial Learning
Paper and Code
Mar 02, 2020
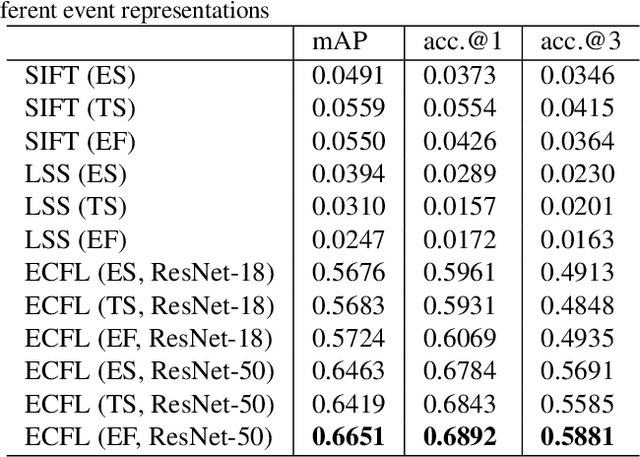
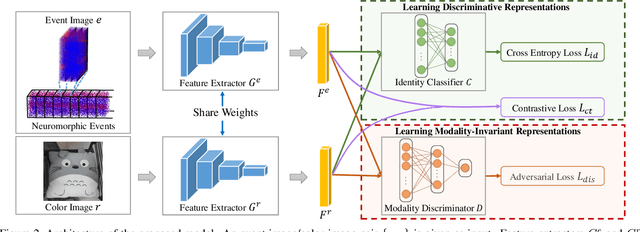

The event camera has appealing properties: high dynamic range, low latency, low power consumption and low memory usage, and thus provides complementariness to conventional frame-based cameras. It only captures the dynamics of a scene and is able to capture almost "continuous" motion. However, different from frame-based camera that reflects the whole appearance as scenes are, the event camera casts away the detailed characteristics of objects, such as texture and color. To take advantages of both modalities, the event camera and frame-based camera are combined together for various machine vision tasks. Then the cross-modal matching between neuromorphic events and color images plays a vital and essential role. In this paper, we propose the Event-Based Image Retrieval (EBIR) problem to exploit the cross-modal matching task. Given an event stream depicting a particular object as query, the aim is to retrieve color images containing the same object. This problem is challenging because there exists a large modality gap between neuromorphic events and color images. We address the EBIR problem by proposing neuromorphic Events-Color image Feature Learning (ECFL). Particularly, the adversarial learning is employed to jointly model neuromorphic events and color images into a common embedding space. We also contribute to the community N-UKbench and EC180 dataset to promote the development of EBIR problem. Extensive experiments on our datasets show that the proposed method is superior in learning effective modality-invariant representation to link two different modalities.