 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaskedMimic: Unified Physics-Based Character Control Through Masked Motion Inpainting
Paper and Code
Sep 22, 2024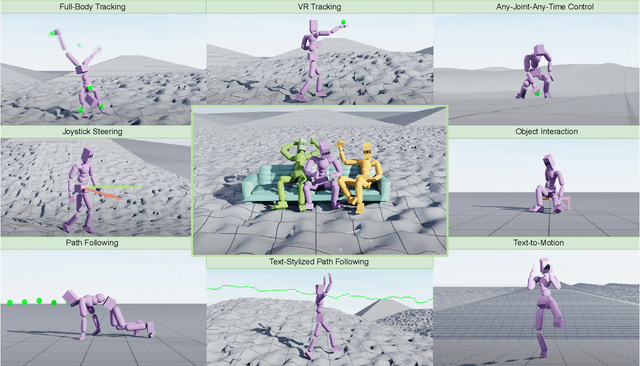
Crafting a single, versatile physics-based controller that can breathe life into interactive characters across a wide spectrum of scenarios represents an exciting frontier in character animation. An ideal controller should support diverse control modalities, such as sparse target keyframes, text instructions, and scene information. While previous works have proposed physically simulated, scene-aware control models, these systems have predominantly focused on developing controllers that each specializes in a narrow set of tasks and control modalities. This work presents MaskedMimic, a novel approach that formulates physics-based character control as a general motion inpainting problem. Our key insight is to train a single unified model to synthesize motions from partial (masked) motion descriptions, such as masked keyframes, objects, text descriptions, or any combination thereof. This is achieved by leveraging motion tracking data and designing a scalable training method that can effectively utilize diverse motion descriptions to produce coherent animations. Through this process, our approach learns a physics-based controller that provides an intuitive control interface without requiring tedious reward engineering for all behaviors of interest. The resulting controller supports a wide range of control modalities and enables seamless transitions between disparate tasks. By unifying character control through motion inpainting, MaskedMimic creates versatile virtual characters. These characters can dynamically adapt to complex scenes and compose diverse motions on demand, enabling more interactive and immersive experiences.