 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLine Flow based SLAM
Paper and Code
Sep 21, 2020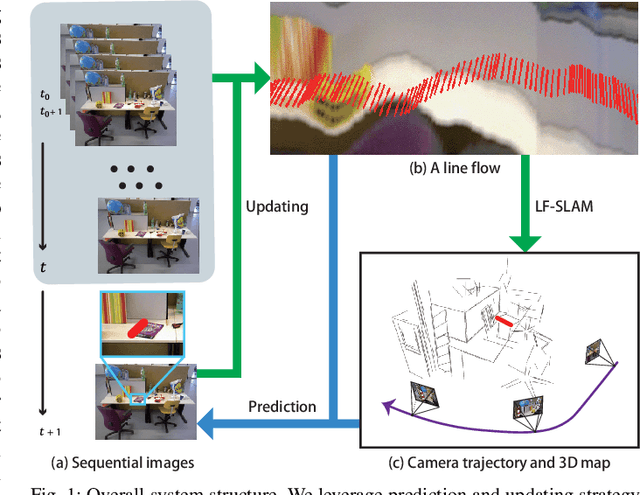
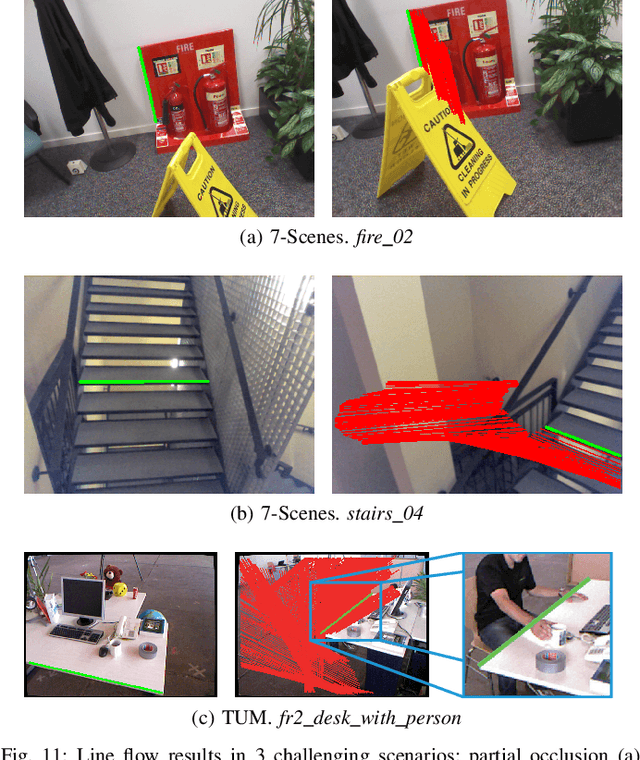
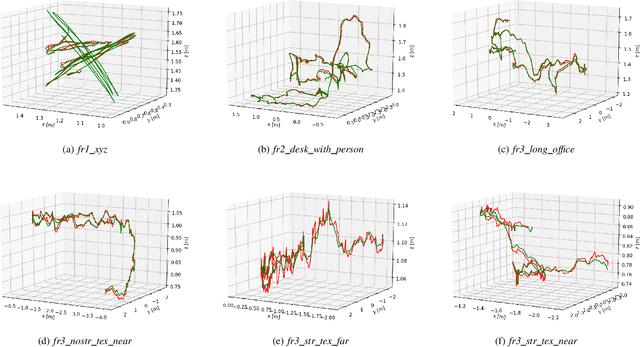
We propose a method of visual SLAM by predicting and updating line flows that represent sequential 2D projections of 3D line segments. While indirect SLAM methods using points and line segments have achieved excellent results, they still face problems in challenging scenarios such as occlusions, image blur, and repetitive textures. To deal with these problems, we leverage line flows which encode the coherence of 2D and 3D line segments in spatial and temporal domains as the sequence of all the 2D line segments corresponding to a specific 3D line segment. Thanks to the line flow representation, the corresponding 2D line segment in a new frame can be predicted based on 2D and 3D line segment motions. We create, update, merge, and discard line flows on-the-fly. We model our Line Flow-based SLAM (LF-SLAM) using a Bayesian network. We perform short-term optimization in front-end, and long-term optimization in back-end. The constraints introduced in line flows improve the performance of our LF-SLAM. Extensive experimental results demonstrate that our method achieves better performance than state-of-the-art direct and indirect SLAM approaches. Specifically, it obtains good localization and mapping results in challenging scenes with occlusions, image blur, and repetitive textures.