 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Object Priors for Point Tracking
Paper and Code
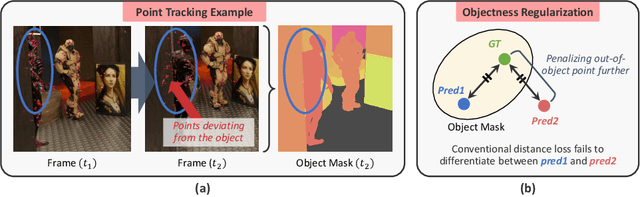
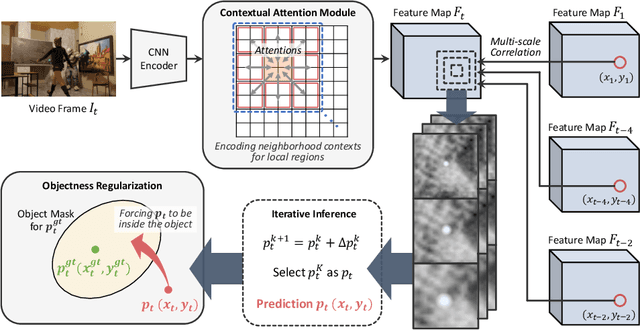

Point tracking is a fundamental problem in computer vision with numerous applications in AR and robotics. A common failure mode in long-term point tracking occurs when the predicted point leaves the object it belongs to and lands on the background or another object. We identify this as the failure to correctly capture objectness properties in learning to track. To address this limitation of prior work, we propose a novel objectness regularization approach that guides points to be aware of object priors by forcing them to stay inside the the boundaries of object instances. By capturing objectness cues at training time, we avoid the need to compute object masks during testing. In addition, we leverage contextual attention to enhance the feature representation for capturing objectness at the feature level more effectively. As a result, our approach achieves state-of-the-art performance on three point tracking benchmarks, and we further validate the effectiveness of our components via ablation studies. The source code is available at: https://github.com/RehgLab/tracking_objectness