 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet's Get Dirty: GAN Based Data Augmentation for Soiling and Adverse Weather Classification in Autonomous Driving
Paper and Code

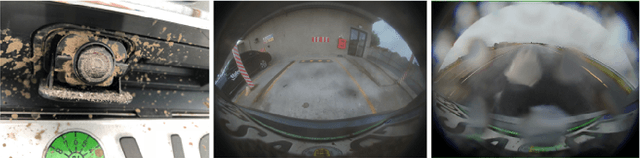
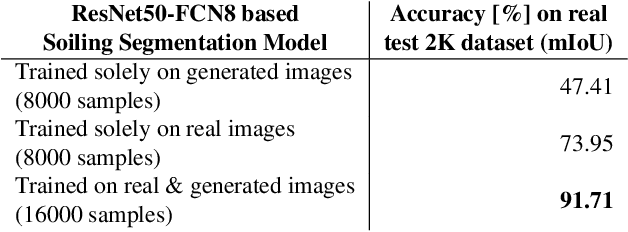
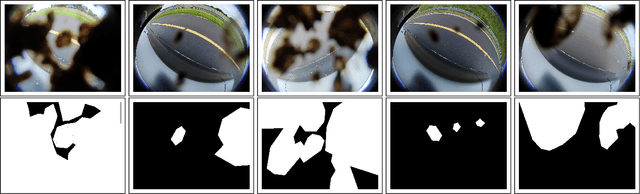
Cameras are getting more and more important in autonomous driving. Wide-angle fisheye cameras are relatively cheap sensors and very suitable for automated parking and low-speed navigation tasks. Four of such cameras form a surround-view system that provides a complete and detailed view around the vehicle. These cameras are usually directly exposed to harsh environmental settings and therefore can get soiled very easily by mud, dust, water, frost, etc. The soiling on the camera lens has a direct impact on the further processing of the images they provide. While adverse weather conditions, such as rain, are getting attention recently, there is limited work on lens soiling. We believe that one of the reasons is that it is difficult to build a diverse dataset for this task, which is moreover expensive to annotate. We propose a novel GAN based algorithm for generating artificial soiling data along with the corresponding annotation masks. The manually annotated soiling dataset and the generated augmentation dataset will be made public. We demonstrate the generalization of our fisheye trained soiling GAN model on the Cityscapes dataset. Additionally, we provide an empirical evaluation of the degradation of the semantic segmentation algorithm with the soiled data.