 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Solve Tasks with Exploring Prior Behaviours
Paper and Code
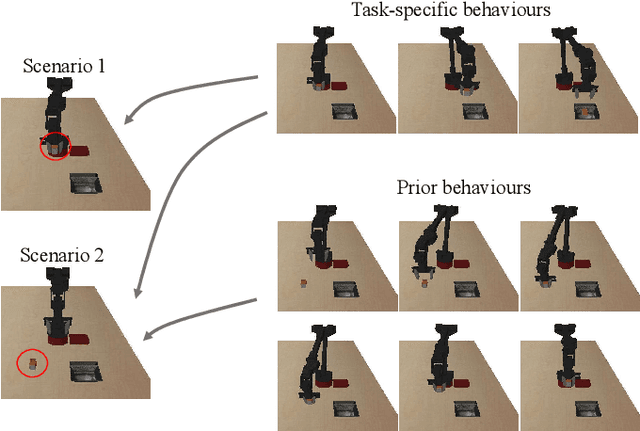
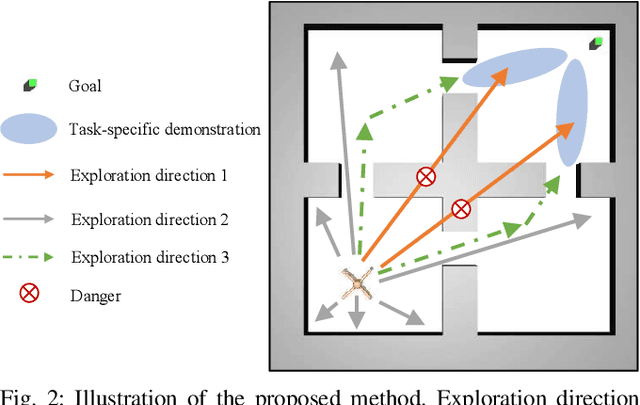
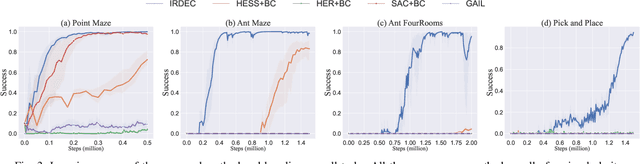
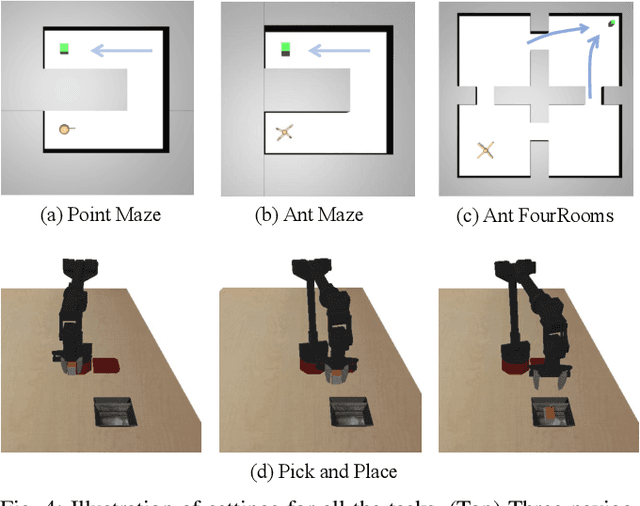
Demonstrations are widely used in Deep Reinforcement Learning (DRL) for facilitating solving tasks with sparse rewards. However, the tasks in real-world scenarios can often have varied initial conditions from the demonstration, which would require additional prior behaviours. For example, consider we are given the demonstration for the task of \emph{picking up an object from an open drawer}, but the drawer is closed in the training. Without acquiring the prior behaviours of opening the drawer, the robot is unlikely to solve the task. To address this, in this paper we propose an Intrinsic Rewards Driven Example-based Control \textbf{(IRDEC)}. Our method can endow agents with the ability to explore and acquire the required prior behaviours and then connect to the task-specific behaviours in the demonstration to solve sparse-reward tasks without requiring additional demonstration of the prior behaviours. The performance of our method outperforms other baselines on three navigation tasks and one robotic manipulation task with sparse rewards. Codes are available at https://github.com/Ricky-Zhu/IRDEC.