 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Map Vehicles into Bird's Eye View
Paper and Code
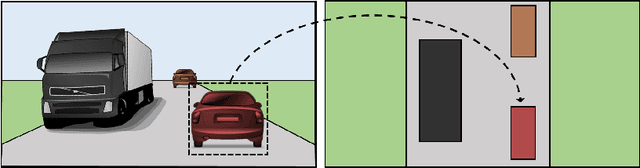
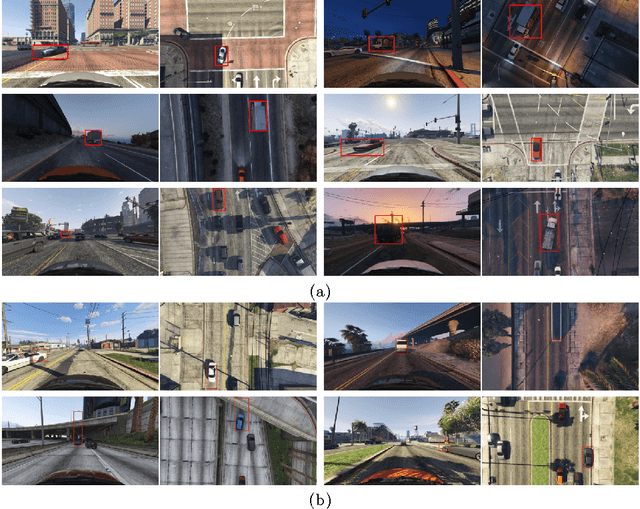
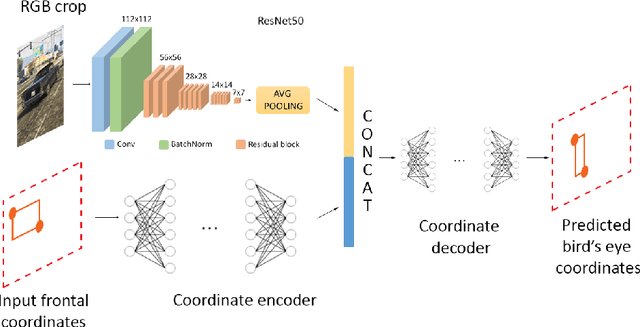
Awareness of the road scene is an essential component for both autonomous vehicles and Advances Driver Assistance Systems and is gaining importance both for the academia and car companies. This paper presents a way to learn a semantic-aware transformation which maps detections from a dashboard camera view onto a broader bird's eye occupancy map of the scene. To this end, a huge synthetic dataset featuring 1M couples of frames, taken from both car dashboard and bird's eye view, has been collected and automatically annotated. A deep-network is then trained to warp detections from the first to the second view. We demonstrate the effectiveness of our model against several baselines and observe that is able to generalize on real-world data despite having been trained solely on synthetic ones.