 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Jump from Pixels
Paper and Code
Oct 28, 2021
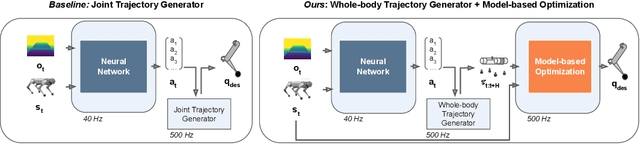
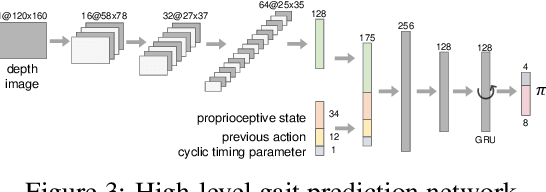
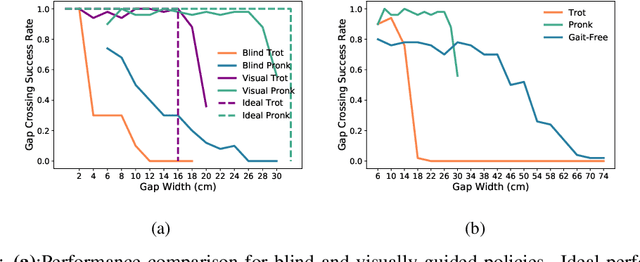
Today's robotic quadruped systems can robustly walk over a diverse range of rough but continuous terrains, where the terrain elevation varies gradually. Locomotion on discontinuous terrains, such as those with gaps or obstacles, presents a complementary set of challenges. In discontinuous settings, it becomes necessary to plan ahead using visual inputs and to execute agile behaviors beyond robust walking, such as jumps. Such dynamic motion results in significant motion of onboard sensors, which introduces a new set of challenges for real-time visual processing. The requirement for agility and terrain awareness in this setting reinforces the need for robust control. We present Depth-based Impulse Control (DIC), a method for synthesizing highly agile visually-guided locomotion behaviors. DIC affords the flexibility of model-free learning but regularizes behavior through explicit model-based optimization of ground reaction forces. We evaluate the proposed method both in simulation and in the real world.