 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Guide and to Be Guided in the Architect-Builder Problem
Paper and Code
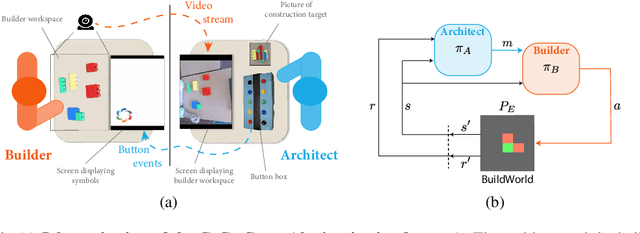
We are interested in interactive agents that learn to coordinate, namely, a $builder$ -- which performs actions but ignores the goal of the task -- and an $architect$ which guides the builder towards the goal of the task. We define and explore a formal setting where artificial agents are equipped with mechanisms that allow them to simultaneously learn a task while at the same time evolving a shared communication protocol. The field of Experimental Semiotics has shown the extent of human proficiency at learning from a priori unknown instructions meanings. Therefore, we take inspiration from it and present the Architect-Builder Problem (ABP): an asymmetrical setting in which an architect must learn to guide a builder towards constructing a specific structure. The architect knows the target structure but cannot act in the environment and can only send arbitrary messages to the builder. The builder on the other hand can act in the environment but has no knowledge about the task at hand and must learn to solve it relying only on the messages sent by the architect. Crucially, the meaning of messages is initially not defined nor shared between the agents but must be negotiated throughout learning. Under these constraints, we propose Architect-Builder Iterated Guiding (ABIG), a solution to the Architect-Builder Problem where the architect leverages a learned model of the builder to guide it while the builder uses self-imitation learning to reinforce its guided behavior. We analyze the key learning mechanisms of ABIG and test it in a 2-dimensional instantiation of the ABP where tasks involve grasping cubes, placing them at a given location, or building various shapes. In this environment, ABIG results in a low-level, high-frequency, guiding communication protocol that not only enables an architect-builder pair to solve the task at hand, but that can also generalize to unseen tasks.