 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Task Decomposition with Ordered Memory Policy Network
Paper and Code
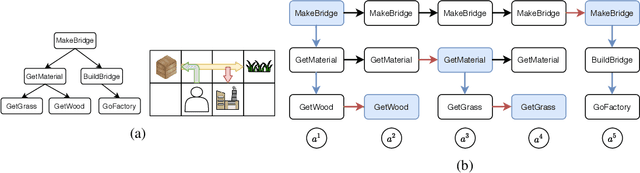
Many complex real-world tasks are composed of several levels of sub-tasks. Humans leverage these hierarchical structures to accelerate the learning process and achieve better generalization. In this work, we study the inductive bias and propose Ordered Memory Policy Network (OMPN) to discover subtask hierarchy by learning from demonstration. The discovered subtask hierarchy could be used to perform task decomposition, recovering the subtask boundaries in an unstruc-tured demonstration. Experiments on Craft and Dial demonstrate that our modelcan achieve higher task decomposition performance under both unsupervised and weakly supervised settings, comparing with strong baselines. OMPN can also bedirectly applied to partially observable environments and still achieve higher task decomposition performance. Our visualization further confirms that the subtask hierarchy can emerge in our model.