 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Symbolic Operators for Task and Motion Planning
Paper and Code
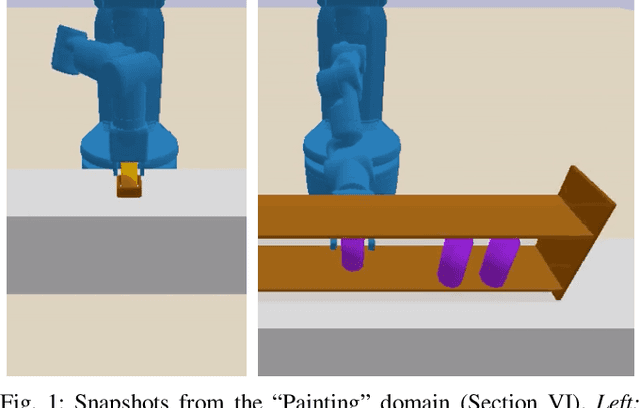
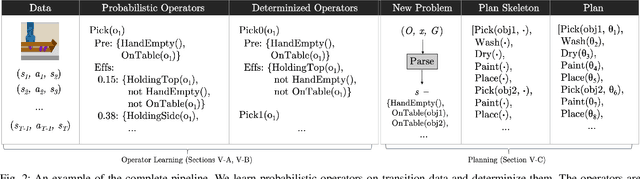


Robotic planning problems in hybrid state and action spaces can be solved by integrated task and motion planners (TAMP) that handle the complex interaction between motion-level decisions and task-level plan feasibility. TAMP approaches rely on domain-specific symbolic operators to guide the task-level search, making planning efficient. In this work, we formalize and study the problem of operator learning for TAMP. Central to this study is the view that operators define a lossy abstraction of the transition model of the underlying domain. We then propose a bottom-up relational learning method for operator learning and show how the learned operators can be used for planning in a TAMP system. Experimentally, we provide results in three domains, including long-horizon robotic planning tasks. We find our approach to substantially outperform several baselines, including three graph neural network-based model-free approaches based on recent work. Video: https://youtu.be/iVfpX9BpBRo