 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Riemannian Manifolds for Geodesic Motion Skills
Paper and Code
Jun 08, 2021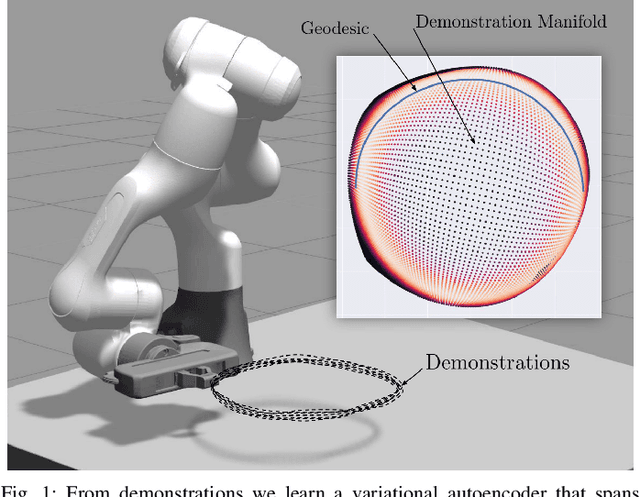


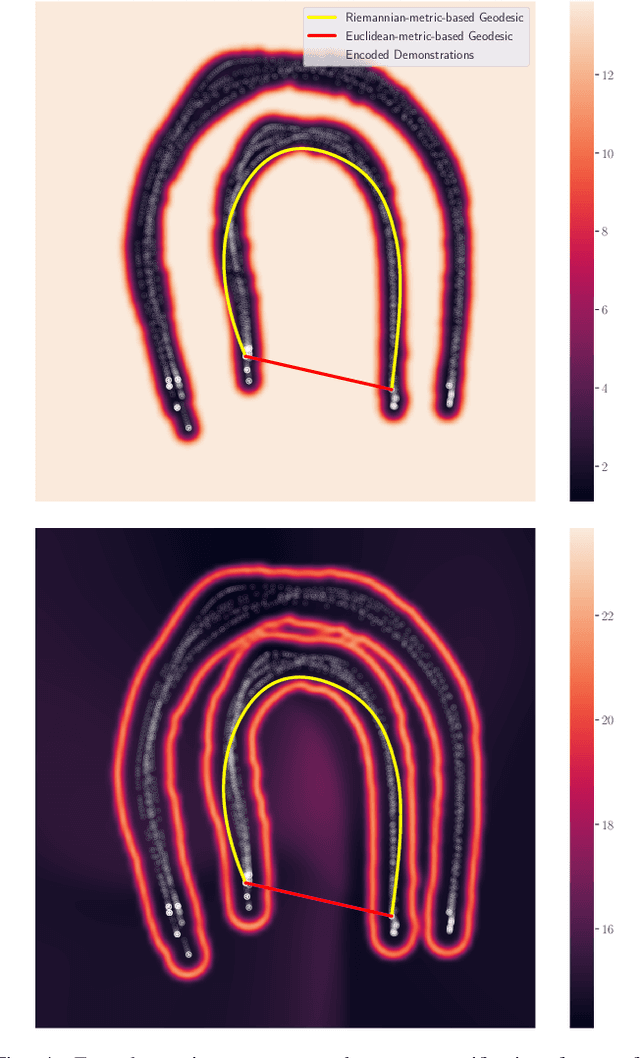
For robots to work alongside humans and perform in unstructured environments, they must learn new motion skills and adapt them to unseen situations on the fly. This demands learning models that capture relevant motion patterns, while offering enough flexibility to adapt the encoded skills to new requirements, such as dynamic obstacle avoidance. We introduce a Riemannian manifold perspective on this problem, and propose to learn a Riemannian manifold from human demonstrations on which geodesics are natural motion skills. We realize this with a variational autoencoder (VAE) over the space of position and orientations of the robot end-effector. Geodesic motion skills let a robot plan movements from and to arbitrary points on the data manifold. They also provide a straightforward method to avoid obstacles by redefining the ambient metric in an online fashion. Moreover, geodesics naturally exploit the manifold resulting from multiple--mode tasks to design motions that were not explicitly demonstrated previously. We test our learning framework using a 7-DoF robotic manipulator, where the robot satisfactorily learns and reproduces realistic skills featuring elaborated motion patterns, avoids previously unseen obstacles, and generates novel movements in multiple-mode settings.