 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Operators with Ignore Effects for Bilevel Planning in Continuous Domains
Paper and Code
Aug 16, 2022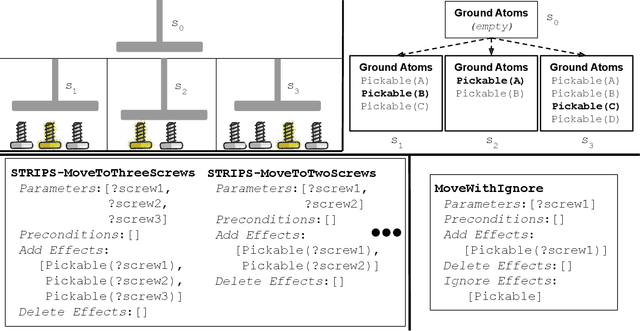
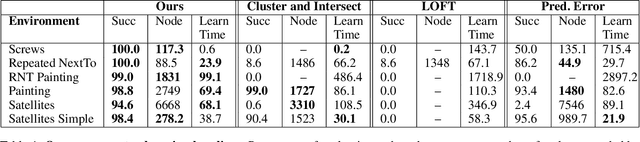
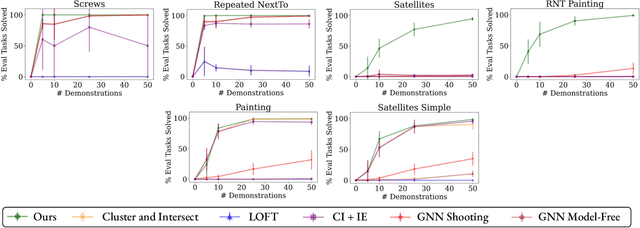
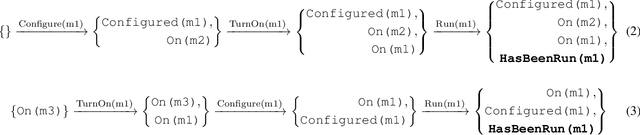
Bilevel planning, in which a high-level search over an abstraction of an environment is used to guide low-level decision making, is an effective approach to solving long-horizon tasks in continuous state and action spaces. Recent work has shown that action abstractions that enable such bilevel planning can be learned in the form of symbolic operators and neural samplers given symbolic predicates and demonstrations that achieve known goals. In this work, we show that existing approaches fall short in environments where actions tend to cause a large number of predicates to change. To address this issue, we propose to learn operators with ignore effects. The key idea motivating our approach is that modeling every observed change in the predicates is unnecessary; the only changes that need be modeled are those that are necessary for high-level search to achieve the specified goal. Experimentally, we show that our approach is able to learn operators with ignore effects across six hybrid robotic domains that enable an agent to solve novel variations of a task, with different initial states, goals, and numbers of objects, significantly more efficiently than several baselines.