 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Neuro-Symbolic Relational Transition Models for Bilevel Planning
Paper and Code
May 28, 2021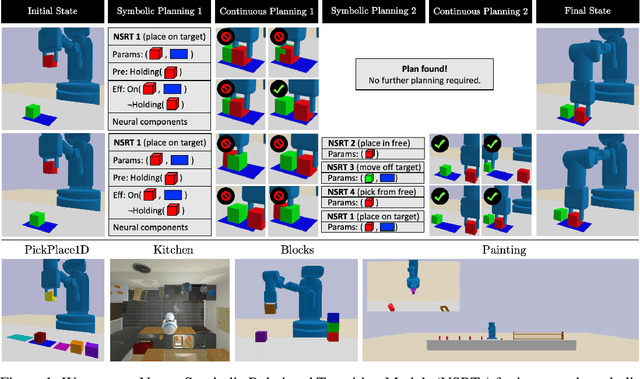

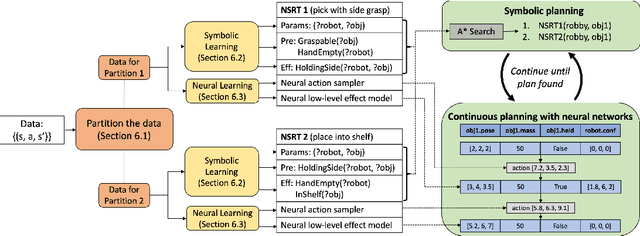

Despite recent, independent progress in model-based reinforcement learning and integrated symbolic-geometric robotic planning, synthesizing these techniques remains challenging because of their disparate assumptions and strengths. In this work, we take a step toward bridging this gap with Neuro-Symbolic Relational Transition Models (NSRTs), a novel class of transition models that are data-efficient to learn, compatible with powerful robotic planning methods, and generalizable over objects. NSRTs have both symbolic and neural components, enabling a bilevel planning scheme where symbolic AI planning in an outer loop guides continuous planning with neural models in an inner loop. Experiments in four robotic planning domains show that NSRTs can be learned after only tens or hundreds of training episodes, and then used for fast planning in new tasks that require up to 60 actions to reach the goal and involve many more objects than were seen during training. Video: https://tinyurl.com/chitnis-nsrts