 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Multi-Arm Manipulation Through Collaborative Teleoperation
Paper and Code
Dec 12, 2020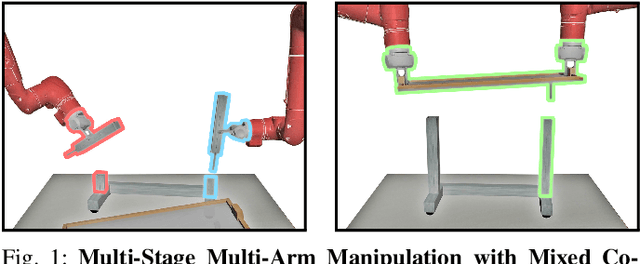
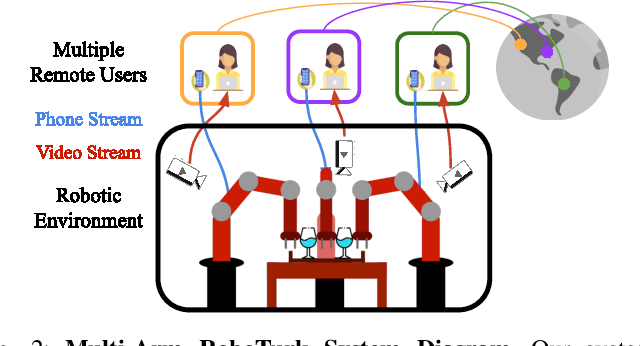
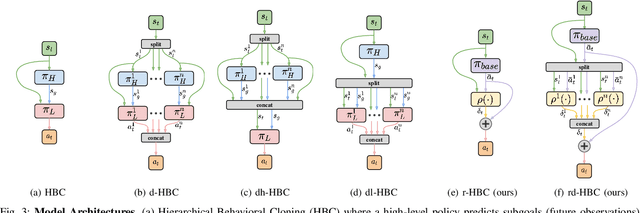
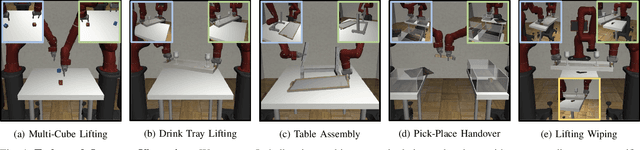
Imitation Learning (IL) is a powerful paradigm to teach robots to perform manipulation tasks by allowing them to learn from human demonstrations collected via teleoperation, but has mostly been limited to single-arm manipulation. However, many real-world tasks require multiple arms, such as lifting a heavy object or assembling a desk. Unfortunately, applying IL to multi-arm manipulation tasks has been challenging -- asking a human to control more than one robotic arm can impose significant cognitive burden and is often only possible for a maximum of two robot arms. To address these challenges, we present Multi-Arm RoboTurk (MART), a multi-user data collection platform that allows multiple remote users to simultaneously teleoperate a set of robotic arms and collect demonstrations for multi-arm tasks. Using MART, we collected demonstrations for five novel two and three-arm tasks from several geographically separated users. From our data we arrived at a critical insight: most multi-arm tasks do not require global coordination throughout its full duration, but only during specific moments. We show that learning from such data consequently presents challenges for centralized agents that directly attempt to model all robot actions simultaneously, and perform a comprehensive study of different policy architectures with varying levels of centralization on our tasks. Finally, we propose and evaluate a base-residual policy framework that allows trained policies to better adapt to the mixed coordination setting common in multi-arm manipulation, and show that a centralized policy augmented with a decentralized residual model outperforms all other models on our set of benchmark tasks. Additional results and videos at https://roboturk.stanford.edu/multiarm .