 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Localized Geometric Features Using 3D-CNN: An Application to Manufacturability Analysis of Drilled Holes
Paper and Code
Jun 22, 2017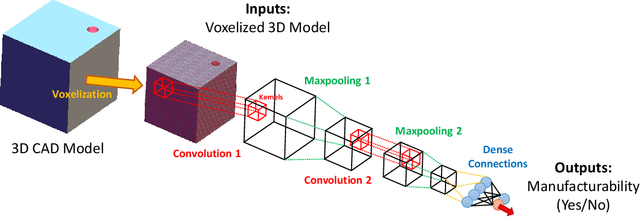
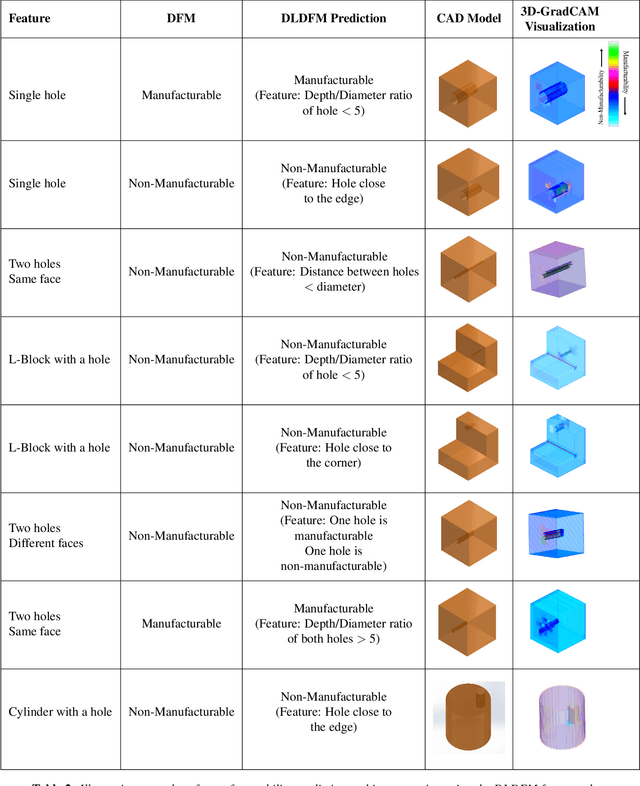
3D convolutional neural networks (3D-CNN) have been used for object recognition based on the voxelized shape of an object. In this paper, we present a 3D-CNN based method to learn distinct local geometric features of interest within an object. In this context, the voxelized representation may not be sufficient to capture the distinguishing information about such local features. To enable efficient learning, we augment the voxel data with surface normals of the object boundary. We then train a 3D-CNN with this augmented data and identify the local features critical for decision-making using 3D gradient-weighted class activation maps. An application of this feature identification framework is to recognize difficult-to-manufacture drilled hole features in a complex CAD geometry. The framework can be extended to identify difficult-to-manufacture features at multiple spatial scales leading to a real-time decision support system for design for manufacturability.