 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Instance Segmentation by Interaction
Paper and Code
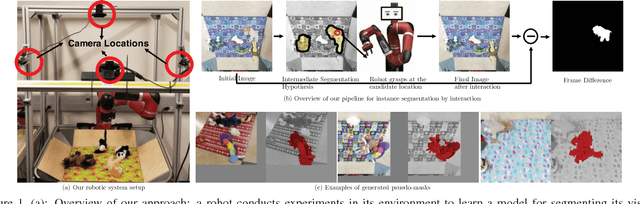
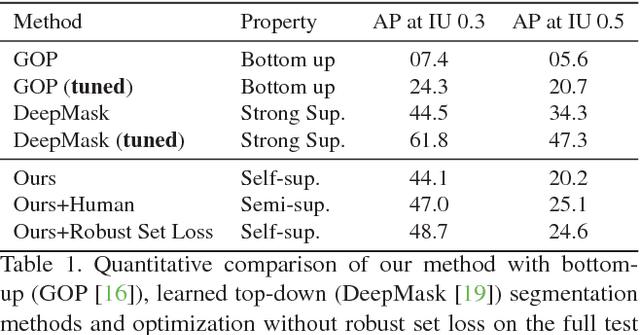
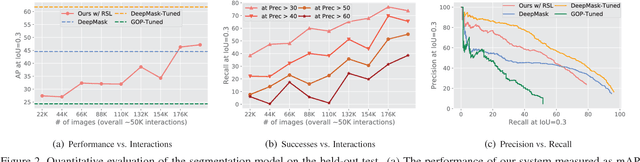
We present an approach for building an active agent that learns to segment its visual observations into individual objects by interacting with its environment in a completely self-supervised manner. The agent uses its current segmentation model to infer pixels that constitute objects and refines the segmentation model by interacting with these pixels. The model learned from over 50K interactions generalizes to novel objects and backgrounds. To deal with noisy training signal for segmenting objects obtained by self-supervised interactions, we propose robust set loss. A dataset of robot's interactions along-with a few human labeled examples is provided as a benchmark for future research. We test the utility of the learned segmentation model by providing results on a downstream vision-based control task of rearranging multiple objects into target configurations from visual inputs alone. Videos, code, and robotic interaction dataset are available at https://pathak22.github.io/seg-by-interaction/