 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning for Disparity Estimation through Feature Constancy
Paper and Code
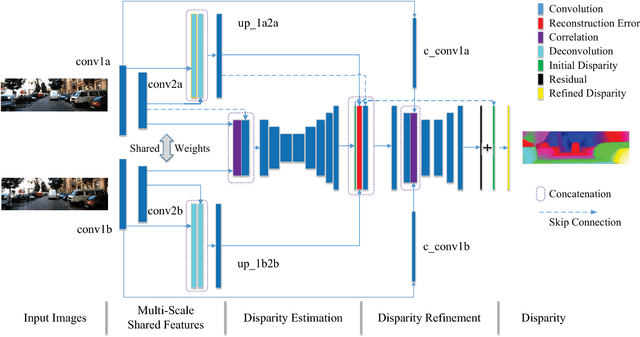
Stereo matching algorithms usually consist of four steps, including matching cost calculation, matching cost aggregation, disparity calculation, and disparity refinement. Existing CNN-based methods only adopt CNN to solve parts of the four steps, or use different networks to deal with different steps, making them difficult to obtain the overall optimal solution. In this paper, we propose a network architecture to incorporate all steps of stereo matching. The network consists of three parts. The first part calculates the multi-scale shared features. The second part performs matching cost calculation, matching cost aggregation and disparity calculation to estimate the initial disparity using shared features. The initial disparity and the shared features are used to calculate the feature constancy that measures correctness of the correspondence between two input images. The initial disparity and the feature constancy are then fed to a sub-network to refine the initial disparity. The proposed method has been evaluated on the Scene Flow and KITTI datasets. It achieves the state-of-the-art performance on the KITTI 2012 and KITTI 2015 benchmarks while maintaining a very fast running time.