 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Event-Based Motion Deblurring
Paper and Code
Apr 13, 2020
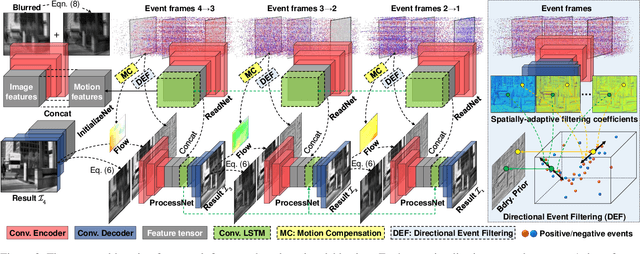
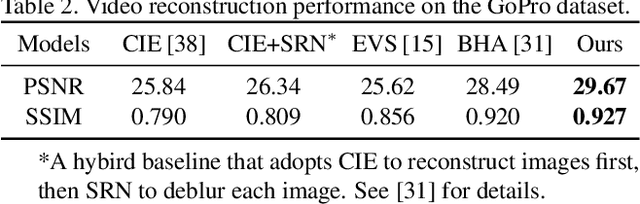

Recovering sharp video sequence from a motion-blurred image is highly ill-posed due to the significant loss of motion information in the blurring process. For event-based cameras, however, fast motion can be captured as events at high time rate, raising new opportunities to exploring effective solutions. In this paper, we start from a sequential formulation of event-based motion deblurring, then show how its optimization can be unfolded with a novel end-to-end deep architecture. The proposed architecture is a convolutional recurrent neural network that integrates visual and temporal knowledge of both global and local scales in principled manner. To further improve the reconstruction, we propose a differentiable directional event filtering module to effectively extract rich boundary prior from the stream of events. We conduct extensive experiments on the synthetic GoPro dataset and a large newly introduced dataset captured by a DAVIS240C camera. The proposed approach achieves state-of-the-art reconstruction quality, and generalizes better to handling real-world motion blur.