 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Environment-Aware Affordance for 3D Articulated Object Manipulation under Occlusions
Paper and Code
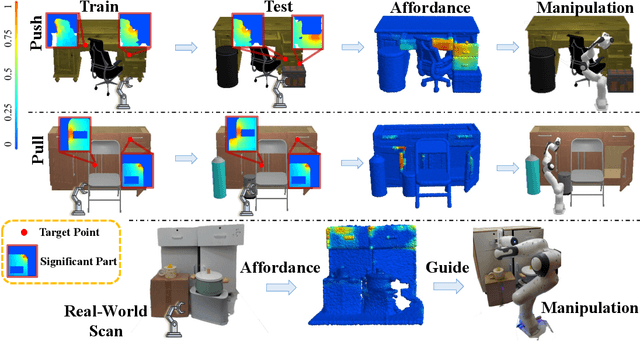
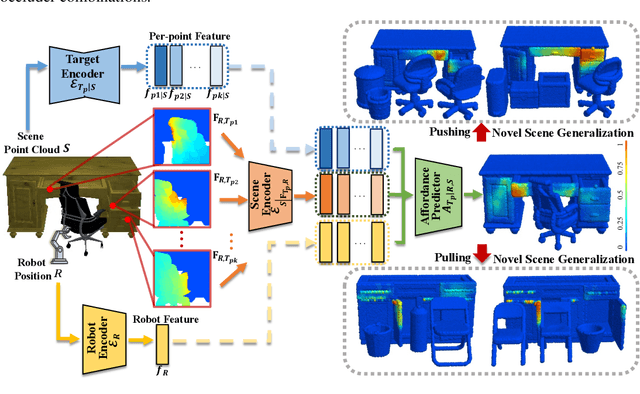

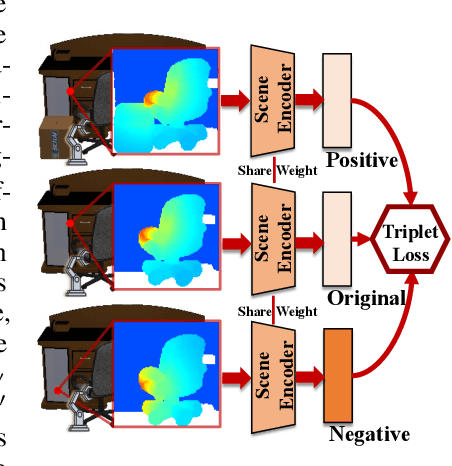
Perceiving and manipulating 3D articulated objects in diverse environments is essential for home-assistant robots. Recent studies have shown that point-level affordance provides actionable priors for downstream manipulation tasks. However, existing works primarily focus on single-object scenarios with homogeneous agents, overlooking the realistic constraints imposed by the environment and the agent's morphology, e.g., occlusions and physical limitations. In this paper, we propose an environment-aware affordance framework that incorporates both object-level actionable priors and environment constraints. Unlike object-centric affordance approaches, learning environment-aware affordance faces the challenge of combinatorial explosion due to the complexity of various occlusions, characterized by their quantities, geometries, positions and poses. To address this and enhance data efficiency, we introduce a novel contrastive affordance learning framework capable of training on scenes containing a single occluder and generalizing to scenes with complex occluder combinations. Experiments demonstrate the effectiveness of our proposed approach in learning affordance considering environment constraints. Project page at https://chengkaiacademycity.github.io/EnvAwareAfford/