 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Bifunctional Push-grasping Synergistic Strategy for Goal-agnostic and Goal-oriented Tasks
Paper and Code
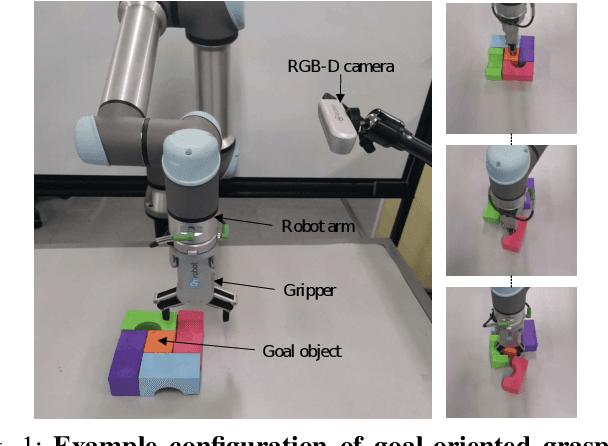
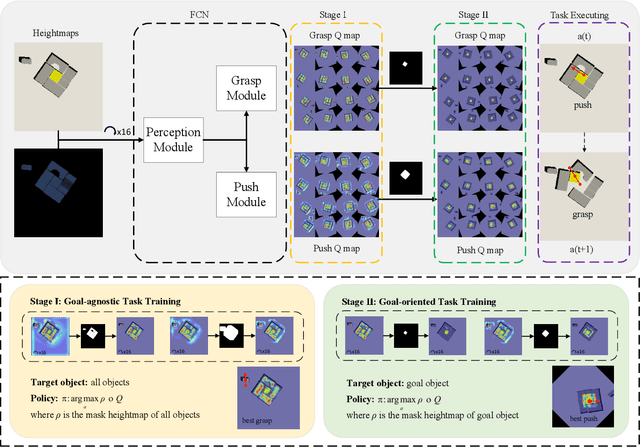
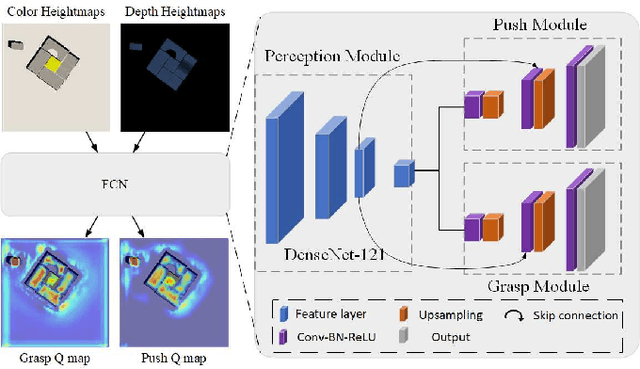

Both goal-agnostic and goal-oriented tasks have practical value for robotic grasping: goal-agnostic tasks target all objects in the workspace, while goal-oriented tasks aim at grasping pre-assigned goal objects. However, most current grasping methods are only better at coping with one task. In this work, we propose a bifunctional push-grasping synergistic strategy for goal-agnostic and goal-oriented grasping tasks. Our method integrates pushing along with grasping to pick up all objects or pre-assigned goal objects with high action efficiency depending on the task requirement. We introduce a bifunctional network, which takes in visual observations and outputs dense pixel-wise maps of Q values for pushing and grasping primitive actions, to increase the available samples in the action space. Then we propose a hierarchical reinforcement learning framework to coordinate the two tasks by considering the goal-agnostic task as a combination of multiple goal-oriented tasks. To reduce the training difficulty of the hierarchical framework, we design a two-stage training method to train the two types of tasks separately. We perform pre-training of the model in simulation, and then transfer the learned model to the real world without any additional real-world fine-tuning. Experimental results show that the proposed approach outperforms existing methods in task completion rate and grasp success rate with less motion number. Supplementary material is available at https: //github.com/DafaRen/Learning_Bifunctional_Push-grasping_Synergistic_Strategy_for_Goal-agnostic_and_Goal-oriented_Tasks