Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Space Roadmap for Visual Action Planning of Deformable and Rigid Object Manipulation
Paper and Code
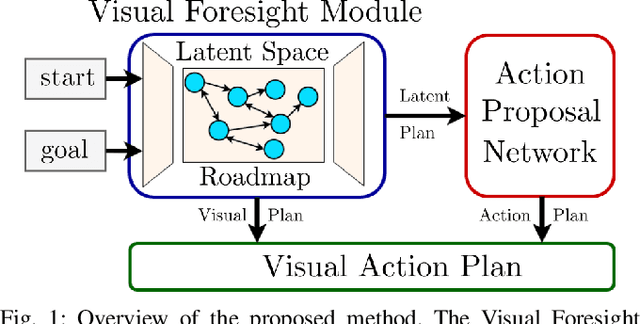
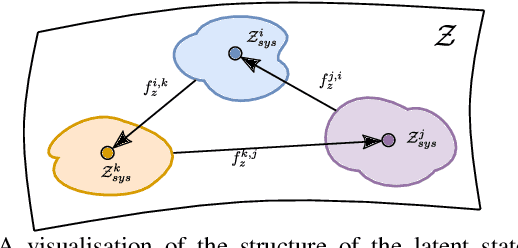
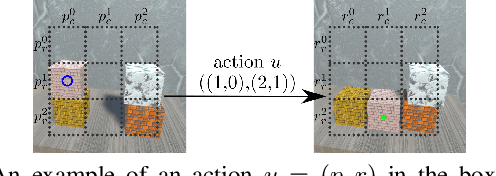
We present a framework for visual action planning of complex manipulation tasks with high-dimensional state spaces such as manipulation of deformable objects. Planning is performed in a low-dimensional latent state space that embeds images. We define and implement a Latent Space Roadmap (LSR) which is a graph-based structure that globally captures the latent system dynamics. Our framework consists of two main components: a Visual Foresight Module (VFM) that generates a visual plan as a sequence of images, and an Action Proposal Network (APN) that predicts the actions between them. We show the effectiveness of the method on a simulated box stacking task as well as a T-shirt folding task performed with a real robot.
* Project website: https://visual-action-planning.github.io/lsr/
View paper on