 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Generative Adversarial Imitation Learning
Paper and Code
Feb 15, 2024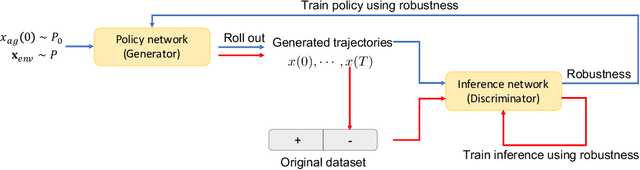
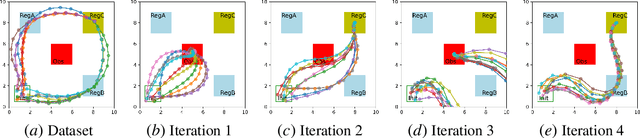
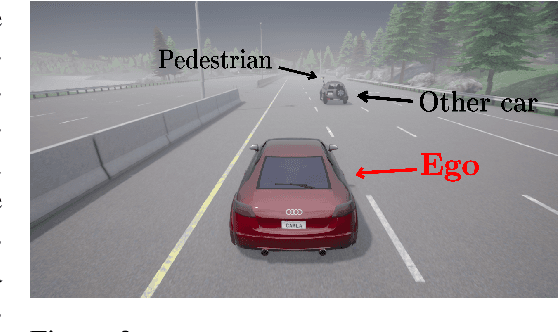
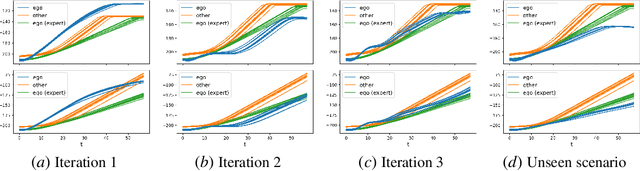
Imitation learning methods have demonstrated considerable success in teaching autonomous systems complex tasks through expert demonstrations. However, a limitation of these methods is their lack of interpretability, particularly in understanding the specific task the learning agent aims to accomplish. In this paper, we propose a novel imitation learning method that combines Signal Temporal Logic (STL) inference and control synthesis, enabling the explicit representation of the task as an STL formula. This approach not only provides a clear understanding of the task but also allows for the incorporation of human knowledge and adaptation to new scenarios through manual adjustments of the STL formulae. Additionally, we employ a Generative Adversarial Network (GAN)-inspired training approach for both the inference and the control policy, effectively narrowing the gap between the expert and learned policies. The effectiveness of our algorithm is demonstrated through two case studies, showcasing its practical applicability and adaptability.