 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Sensing, Navigation, and Communication for Secure UAV Networks with a Mobile Eavesdropper
Paper and Code
May 22, 2023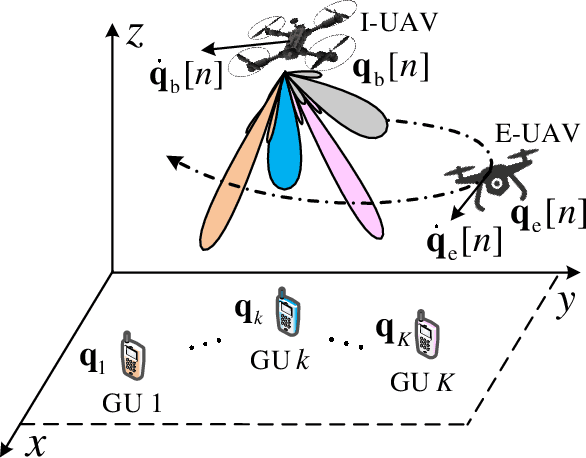
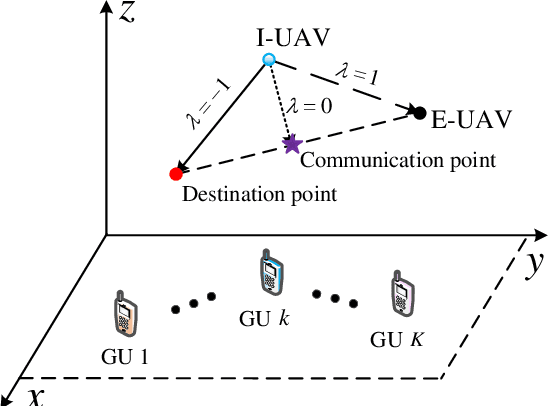
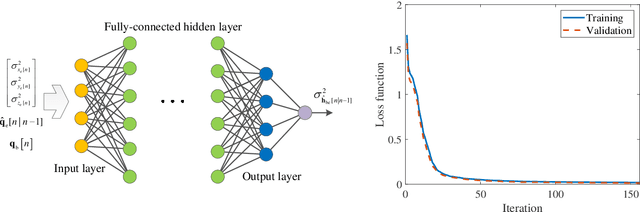
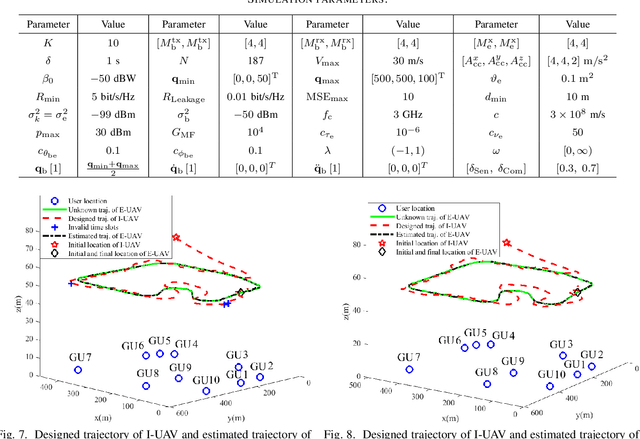
This paper proposes an integrated sensing, navigation, and communication (ISNC) framework for safeguarding unmanned aerial vehicle (UAV)-enabled wireless networks against a mobile eavesdropping UAV (E-UAV). To cope with the mobility of the E-UAV, the proposed framework advocates the dual use of artificial noise transmitted by the information UAV (I-UAV) for simultaneous jamming and sensing to facilitate navigation and secure communication. In particular, the I-UAV communicates with legitimate downlink ground users, while avoiding potential information leakage by emitting jamming signals, and estimates the state of the E-UAV with an extended Kalman filter based on the backscattered jamming signals. Exploiting the estimated state of the E-UAV in the previous time slot, the I-UAV determines its flight planning strategy, predicts the wiretap channel, and designs its communication resource allocation policy for the next time slot. To circumvent the severe coupling between these three tasks, a divide-and-conquer approach is adopted. The online navigation design has the objective to minimize the distance between the I-UAV and a pre-defined destination point considering kinematic and geometric constraints. Subsequently, given the predicted wiretap channel, the robust resource allocation design is formulated as an optimization problem to achieve the optimal trade-off between sensing and communication in the next time slot, while taking into account the wiretap channel prediction error and the quality-of-service (QoS) requirements of secure communication. Simulation results demonstrate the superior performance of the proposed design compared with baseline schemes and validate the benefits of integrating sensing and navigation into secure UAV communication systems.