Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegral Human Pose Regression
Paper and Code



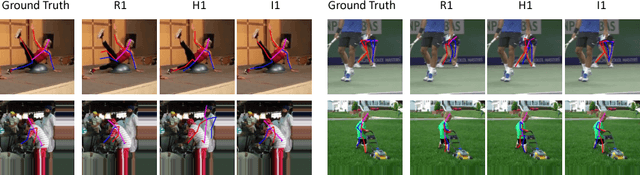
State-of-the-art human pose estimation methods are based on heat map representation. In spite of the good performance, the representation has a few issues in nature, such as not differentiable and quantization error. This work shows that a simple integral operation relates and unifies the heat map representation and joint regression, thus avoiding the above issues. It is differentiable, efficient, and compatible with any heat map based methods. Its effectiveness is convincingly validated via comprehensive ablation experiments under various settings, specifically on 3D pose estimation, for the first time.
View paper on