 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring and Learning Multi-Robot Policies by Observing an Expert
Paper and Code
Sep 17, 2019
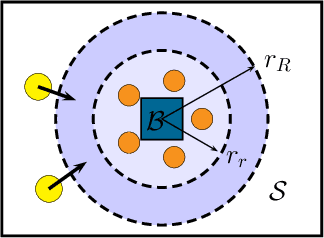
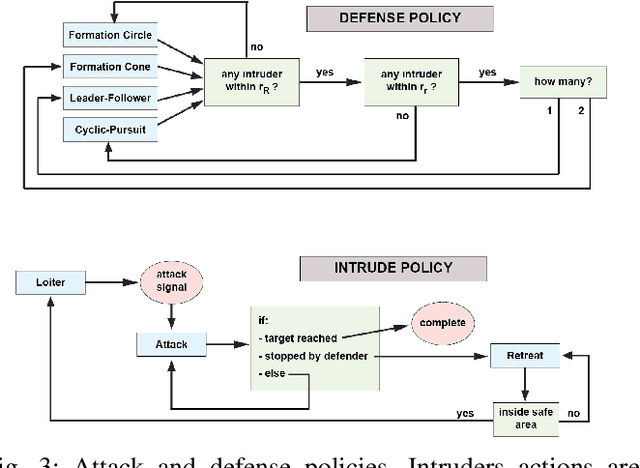

In this paper we present a technique for learning how to solve a multi-robot mission that requires interaction with an external environment by repeatedly observing an expert system executing the same mission. We define the expert system as a team of robots equipped with a library of controllers, each designed to solve a specific task, supervised by an expert policy that appropriately selects controllers based on the states of robots and environment. The objective is for an un-trained team of robots equipped with the same library of controllers, but agnostic to the expert policy, to execute the mission, with performances comparable to those of the expert system. From observations of the expert system, the Interactive Multiple Model technique is used to estimate individual controllers executed by the expert policy. Then, the history of estimated controllers and environmental state is used to learn a policy for the un-trained robots. Considering a perimeter protection scenario on a team of simulated differential-drive robots, we show that the learned policy endows the un-trained team with performances comparable to those of the expert system.