 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Multi-Modal Learning with Uni-Modal Teachers
Paper and Code
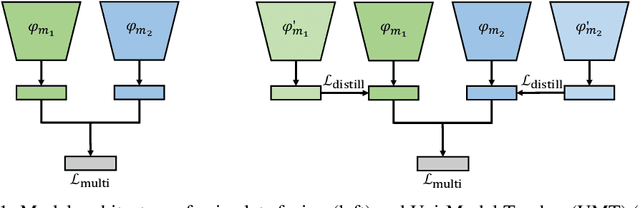
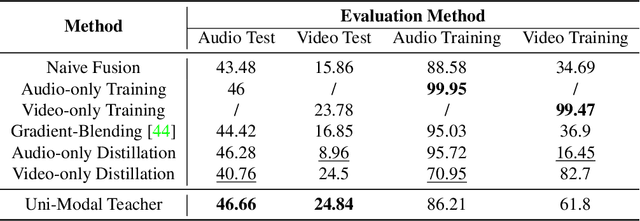
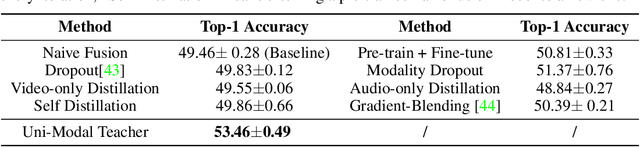
Learning multi-modal representations is an essential step towards real-world robotic applications, and various multi-modal fusion models have been developed for this purpose. However, we observe that existing models, whose objectives are mostly based on joint training, often suffer from learning inferior representations of each modality. We name this problem Modality Failure, and hypothesize that the imbalance of modalities and the implicit bias of common objectives in fusion method prevent encoders of each modality from sufficient feature learning. To this end, we propose a new multi-modal learning method, Uni-Modal Teacher, which combines the fusion objective and uni-modal distillation to tackle the modality failure problem. We show that our method not only drastically improves the representation of each modality, but also improves the overall multi-modal task performance. Our method can be effectively generalized to most multi-modal fusion approaches. We achieve more than 3% improvement on the VGGSound audio-visual classification task, as well as improving performance on the NYU depth V2 RGB-D image segmentation task.