 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIMOST: Incremental Memory Mechanism with Online Self-Supervision for Continual Traversability Learning
Paper and Code
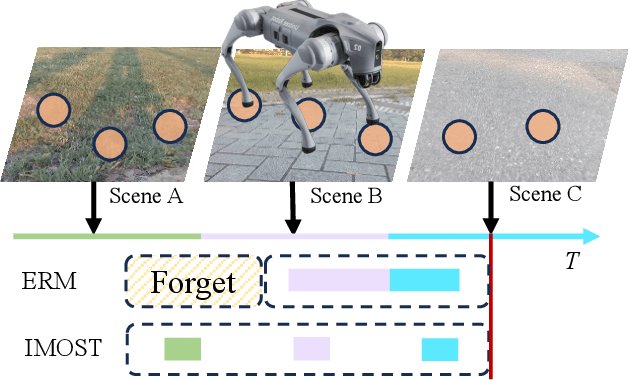
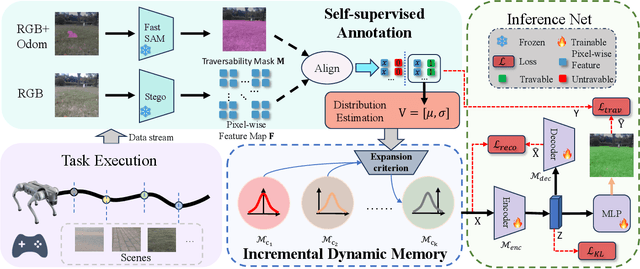
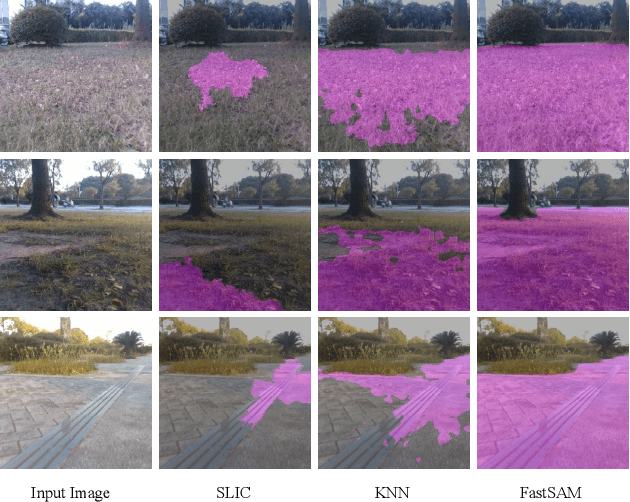

Traversability estimation is the foundation of path planning for a general navigation system. However, complex and dynamic environments pose challenges for the latest methods using self-supervised learning (SSL) technique. Firstly, existing SSL-based methods generate sparse annotations lacking detailed boundary information. Secondly, their strategies focus on hard samples for rapid adaptation, leading to forgetting and biased predictions. In this work, we propose IMOST, a continual traversability learning framework composed of two key modules: incremental dynamic memory (IDM) and self-supervised annotation (SSA). By mimicking human memory mechanisms, IDM allocates novel data samples to new clusters according to information expansion criterion. It also updates clusters based on diversity rule, ensuring a representative characterization of new scene. This mechanism enhances scene-aware knowledge diversity while maintaining a compact memory capacity. The SSA module, integrating FastSAM, utilizes point prompts to generate complete annotations in real time which reduces training complexity. Furthermore, IMOST has been successfully deployed on the quadruped robot, with performance evaluated during the online learning process. Experimental results on both public and self-collected datasets demonstrate that our IMOST outperforms current state-of-the-art method, maintains robust recognition capabilities and adaptability across various scenarios. The code is available at https://github.com/SJTU-MKH/OCLTrav.