 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybridCap: Inertia-aid Monocular Capture of Challenging Human Motions
Paper and Code
Mar 17, 2022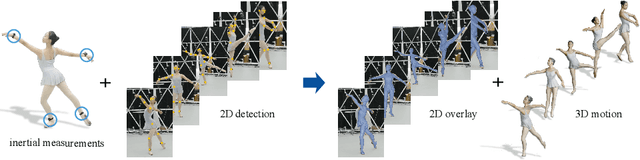

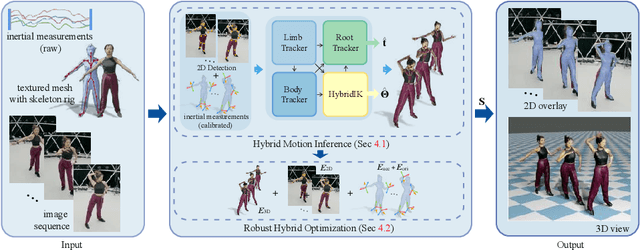
Monocular 3D motion capture (mocap) is beneficial to many applications. The use of a single camera, however, often fails to handle occlusions of different body parts and hence it is limited to capture relatively simple movements. We present a light-weight, hybrid mocap technique called HybridCap that augments the camera with only 4 Inertial Measurement Units (IMUs) in a learning-and-optimization framework. We first employ a weakly-supervised and hierarchical motion inference module based on cooperative Gated Recurrent Unit (GRU) blocks that serve as limb, body and root trackers as well as an inverse kinematics solver. Our network effectively narrows the search space of plausible motions via coarse-to-fine pose estimation and manages to tackle challenging movements with high efficiency. We further develop a hybrid optimization scheme that combines inertial feedback and visual cues to improve tracking accuracy. Extensive experiments on various datasets demonstrate HybridCap can robustly handle challenging movements ranging from fitness actions to Latin dance. It also achieves real-time performance up to 60 fps with state-of-the-art accuracy.