 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Driver Behavior Prediction based on UrbanFlow
Paper and Code
Nov 09, 2019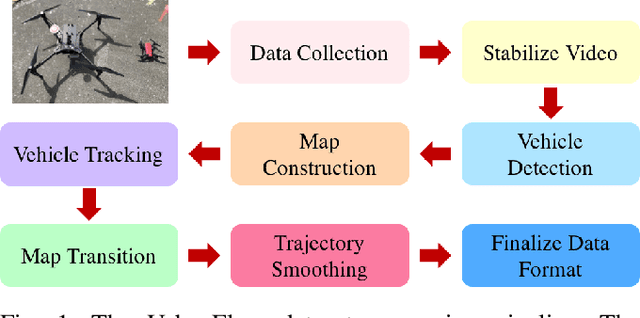


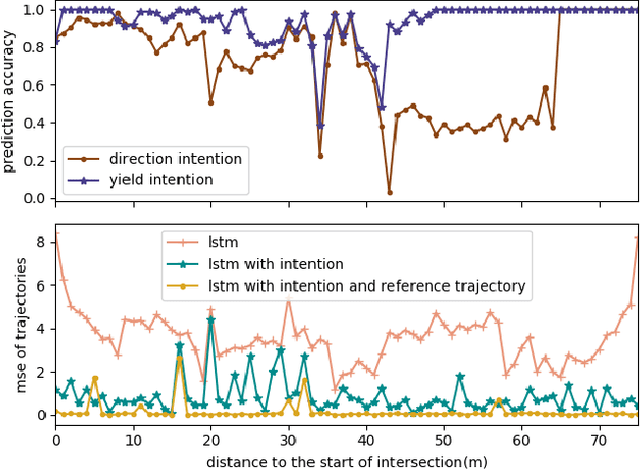
How autonomous vehicles and human drivers share public transportation systems is an important problem, as fully automatic transportation environments are still a long way off. Understanding human drivers' behavior can be beneficial for autonomous vehicle decision making and planning, especially when the autonomous vehicle is surrounded by human drivers who have various driving behaviors and patterns of interaction with other vehicles. In this paper, we propose an LSTM-based trajectory prediction method for human drivers which can help the autonomous vehicle make better decisions, especially in urban intersection scenarios. Meanwhile, in order to collect human drivers' driving behavior data in the urban scenario, we describe a system called UrbanFlow which includes the whole procedure from raw bird's-eye view data collection via drone to the final processed trajectories. The system is mainly intended for urban scenarios but can be extended to be used for any traffic scenarios.