 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGRS: Generating Robotic Simulation Tasks from Real-World Images
Paper and Code
Oct 20, 2024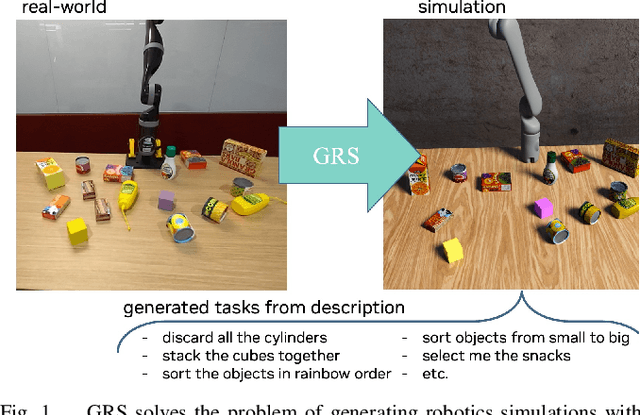
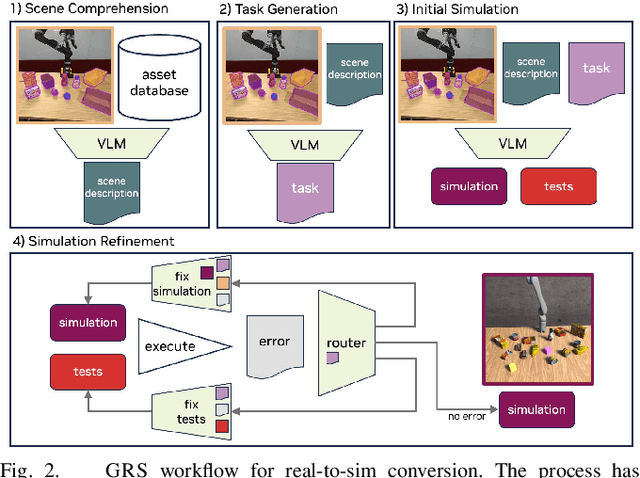
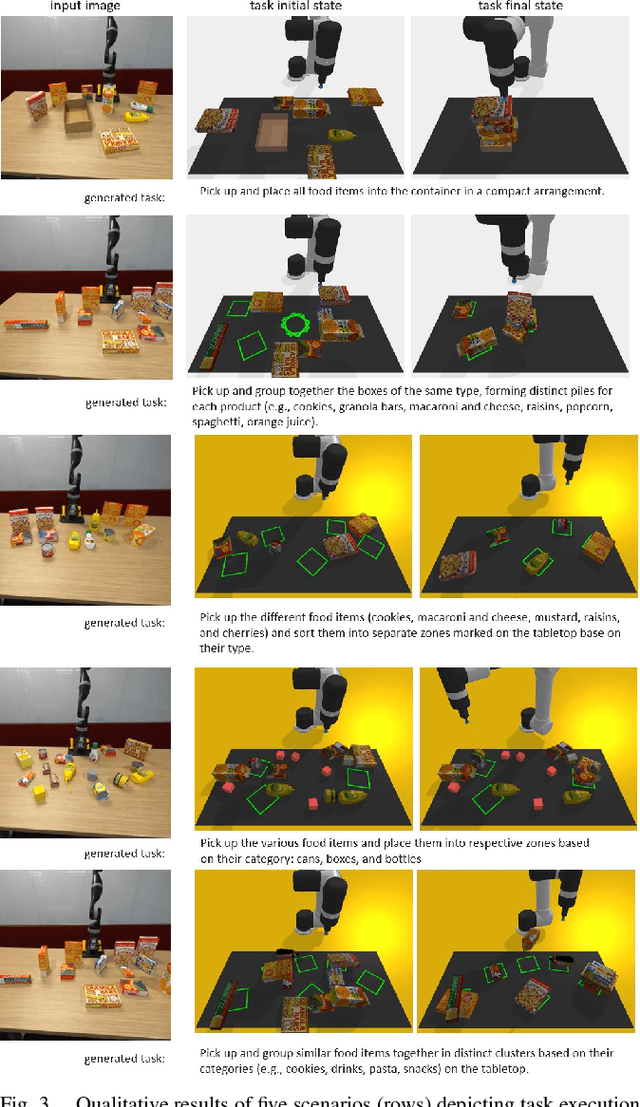

We introduce GRS (Generating Robotic Simulation tasks), a novel system to address the challenge of real-to-sim in robotics, computer vision, and AR/VR. GRS enables the creation of digital twin simulations from single real-world RGB-D observations, complete with diverse, solvable tasks for virtual agent training. We use state-of-the-art vision-language models (VLMs) to achieve a comprehensive real-to-sim pipeline. GRS operates in three stages: 1) scene comprehension using SAM2 for object segmentation and VLMs for object description, 2) matching identified objects with simulation-ready assets, and 3) generating contextually appropriate robotic tasks. Our approach ensures simulations align with task specifications by generating test suites designed to verify adherence to the task specification. We introduce a router that iteratively refines the simulation and test code to ensure the simulation is solvable by a robot policy while remaining aligned to the task specification. Our experiments demonstrate the system's efficacy in accurately identifying object correspondence, which allows us to generate task environments that closely match input environments, and enhance automated simulation task generation through our novel router mechanism.