 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreen Robotic Mixed Reality with Gaussian Splatting
Paper and Code
Apr 18, 2025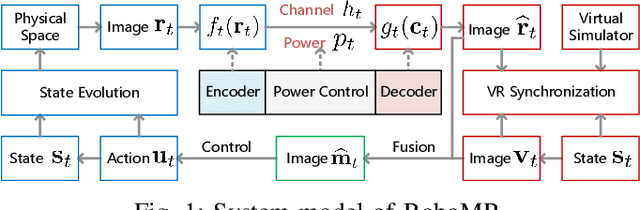

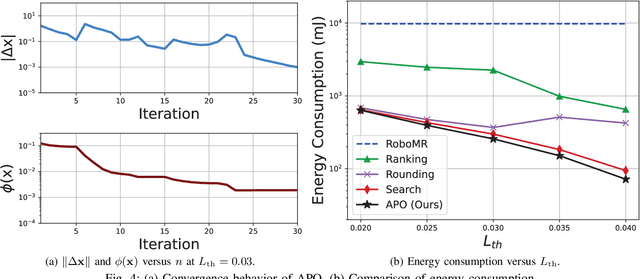
Realizing green communication in robotic mixed reality (RoboMR) systems presents a challenge, due to the necessity of uploading high-resolution images at high frequencies through wireless channels. This paper proposes Gaussian splatting (GS) RoboMR (GSRMR), which achieves a lower energy consumption and makes a concrete step towards green RoboMR. The crux to GSRMR is to build a GS model which enables the simulator to opportunistically render a photo-realistic view from the robot's pose, thereby reducing the need for excessive image uploads. Since the GS model may involve discrepancies compared to the actual environments, a GS cross-layer optimization (GSCLO) framework is further proposed, which jointly optimizes content switching (i.e., deciding whether to upload image or not) and power allocation across different frames. The GSCLO problem is solved by an accelerated penalty optimization (APO) algorithm. Experiments demonstrate that the proposed GSRMR reduces the communication energy by over 10x compared with RoboMR. Furthermore, the proposed GSRMR with APO outperforms extensive baseline schemes, in terms of peak signal-to-noise ratio (PSNR) and structural similarity index measure (SSIM).