 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient-based Camera Exposure Control for Outdoor Mobile Platforms
Paper and Code
Jun 13, 2018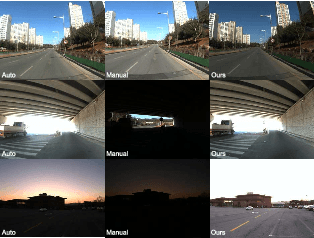
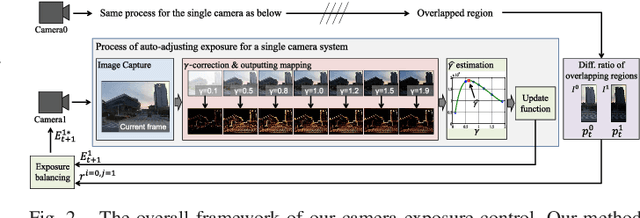
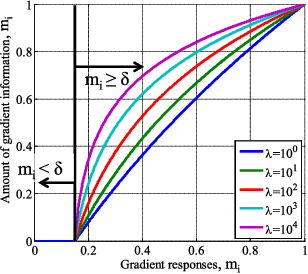
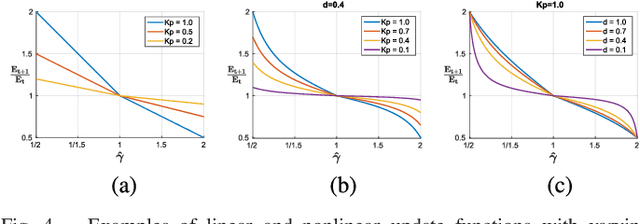
We introduce a novel method to automatically adjust camera exposure for image processing and computer vision applications on mobile robot platforms. Because most image processing algorithms rely heavily on low-level image features that are based mainly on local gradient information, we consider that gradient quantity can determine the proper exposure level, allowing a camera to capture the important image features in a manner robust to illumination conditions. We then extend this concept to a multi-camera system and present a new control algorithm to achieve both brightness consistency between adjacent cameras and a proper exposure level for each camera. We implement our prototype system with off-the-shelf machine-vision cameras and demonstrate the effectiveness of the proposed algorithms on practical applications, including pedestrian detection, visual odometry, surround-view imaging, panoramic imaging and stereo matching.