 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobally Optimal Relative Pose Estimation with Gravity Prior
Paper and Code

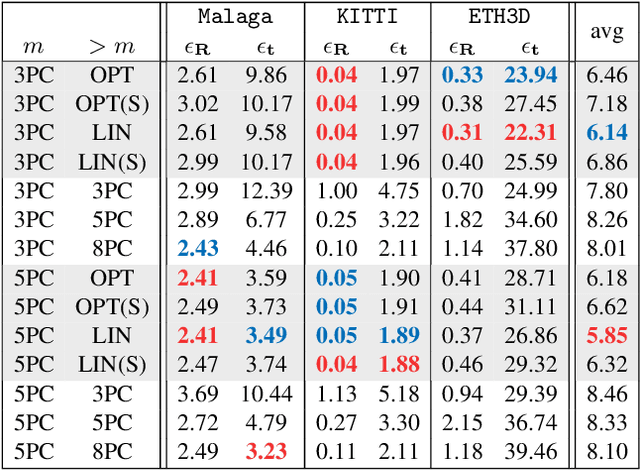


Smartphones, tablets and camera systems used, e.g., in cars and UAVs, are typically equipped with IMUs (inertial measurement units) that can measure the gravity vector accurately. Using this additional information, the $y$-axes of the cameras can be aligned, reducing their relative orientation to a single degree-of-freedom. With this assumption, we propose a novel globally optimal solver, minimizing the algebraic error in the least-squares sense, to estimate the relative pose in the over-determined case. Based on the epipolar constraint, we convert the optimization problem into solving two polynomials with only two unknowns. Also, a fast solver is proposed using the first-order approximation of the rotation. The proposed solvers are compared with the state-of-the-art ones on four real-world datasets with approx. 50000 image pairs in total. Moreover, we collected a dataset, by a smartphone, consisting of 10933 image pairs, gravity directions, and ground truth 3D reconstructions.