 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlassLoc: Plenoptic Grasp Pose Detection in Transparent Clutter
Paper and Code
Sep 17, 2019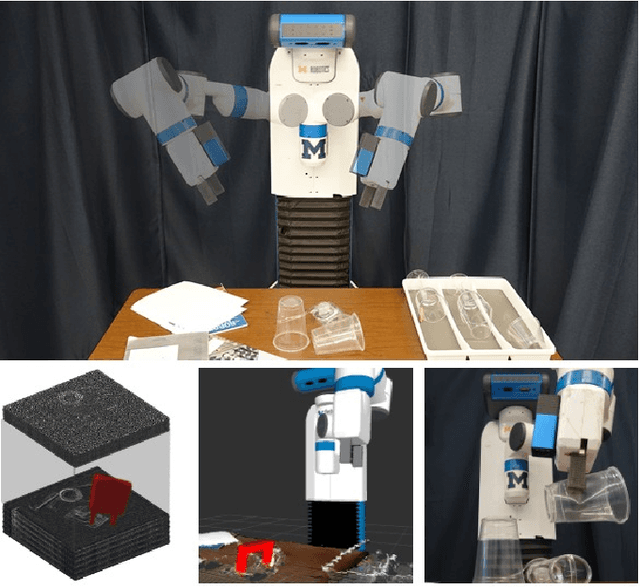
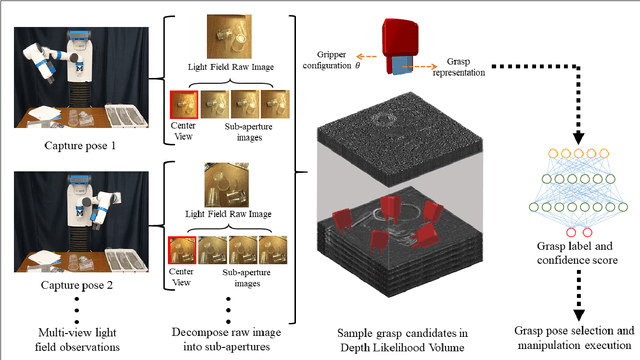
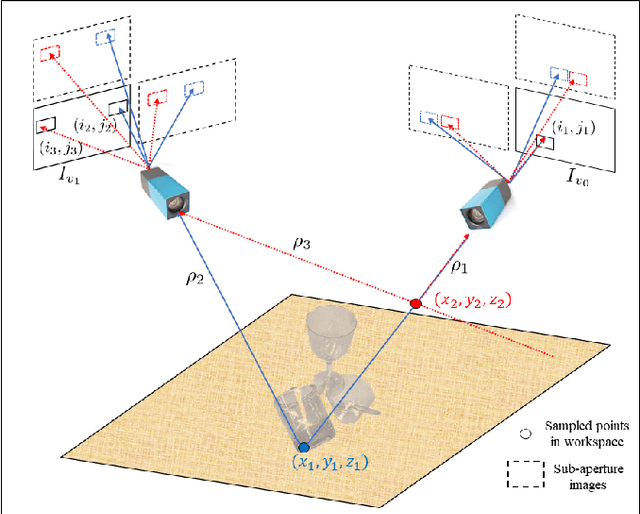
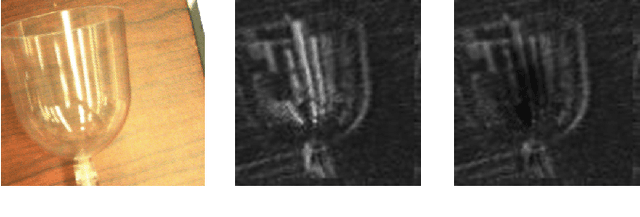
Transparent objects are prevalent across many environments of interest for dexterous robotic manipulation. Such transparent material leads to considerable uncertainty for robot perception and manipulation, and remains an open challenge for robotics. This problem is exacerbated when multiple transparent objects cluster into piles of clutter. In household environments, for example, it is common to encounter piles of glassware in kitchens, dining rooms, and reception areas, which are essentially invisible to modern robots. We present the GlassLoc algorithm for grasp pose detection of transparent objects in transparent clutter using plenoptic sensing. GlassLoc classifies graspable locations in space informed by a Depth Likelihood Volume (DLV) descriptor. We extend the DLV to infer the occupancy of transparent objects over a given space from multiple plenoptic viewpoints. We demonstrate and evaluate the GlassLoc algorithm on a Michigan Progress Fetch mounted with a first-generation Lytro. The effectiveness of our algorithm is evaluated through experiments for grasp detection and execution with a variety of transparent glassware in minor clutter.