 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Robust Supervision for Learning-Based Visual Navigation Using Hamilton-Jacobi Reachability
Paper and Code
Dec 20, 2019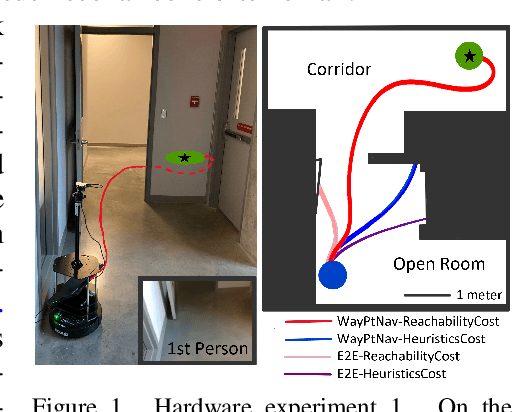

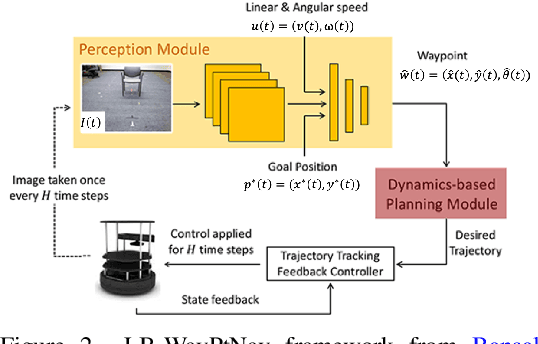
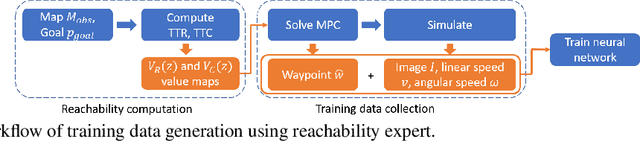
In Bansal et al. (2019), a novel visual navigation framework that combines learning-based and model-based approaches has been proposed. Specifically, a Convolutional Neural Network (CNN) predicts a waypoint that is used by the dynamics model for planning and tracking a trajectory to the waypoint. However, the CNN inevitably makes prediction errors, ultimately leading to collisions, especially when the robot is navigating through cluttered and tight spaces. In this paper, we present a novel Hamilton-Jacobi (HJ) reachability-based method to generate supervision for the CNN for waypoint prediction. By modeling the prediction error of the CNN as disturbances in dynamics, the proposed method generates waypoints that are robust to these disturbances, and consequently to the prediction errors. Moreover, using globally optimal HJ reachability analysis leads to predicting waypoints that are time-efficient and do not exhibit greedy behavior. Through simulations and experiments on a hardware testbed, we demonstrate the advantages of the proposed approach for navigation tasks where the robot needs to navigate through cluttered, narrow indoor environments.