 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Plans that Predict Themselves
Paper and Code
Feb 14, 2018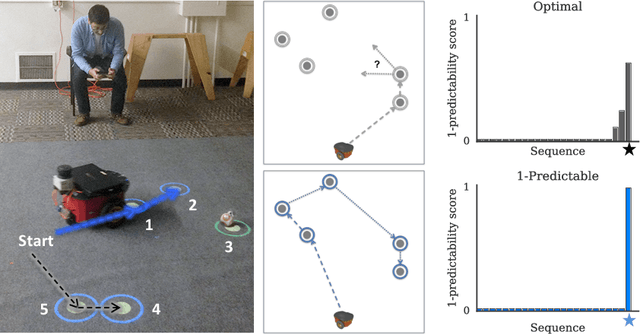
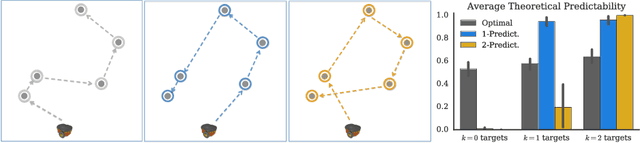
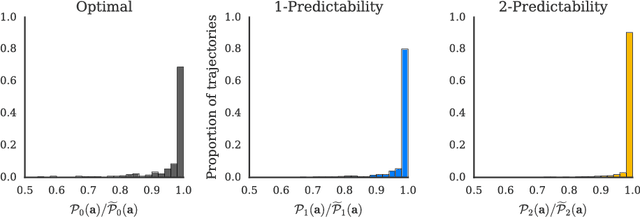
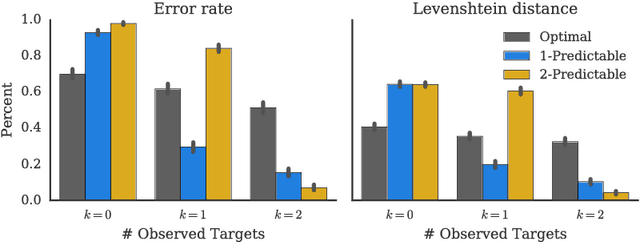
Collaboration requires coordination, and we coordinate by anticipating our teammates' future actions and adapting to their plan. In some cases, our teammates' actions early on can give us a clear idea of what the remainder of their plan is, i.e. what action sequence we should expect. In others, they might leave us less confident, or even lead us to the wrong conclusion. Our goal is for robot actions to fall in the first category: we want to enable robots to select their actions in such a way that human collaborators can easily use them to correctly anticipate what will follow. While previous work has focused on finding initial plans that convey a set goal, here we focus on finding two portions of a plan such that the initial portion conveys the final one. We introduce $t$-\ACty{}: a measure that quantifies the accuracy and confidence with which human observers can predict the remaining robot plan from the overall task goal and the observed initial $t$ actions in the plan. We contribute a method for generating $t$-predictable plans: we search for a full plan that accomplishes the task, but in which the first $t$ actions make it as easy as possible to infer the remaining ones. The result is often different from the most efficient plan, in which the initial actions might leave a lot of ambiguity as to how the task will be completed. Through an online experiment and an in-person user study with physical robots, we find that our approach outperforms a traditional efficiency-based planner in objective and subjective collaboration metrics.