Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussian Process-based Stochastic Model Predictive Control for Overtaking in Autonomous Racing
Paper and Code
May 25, 2021

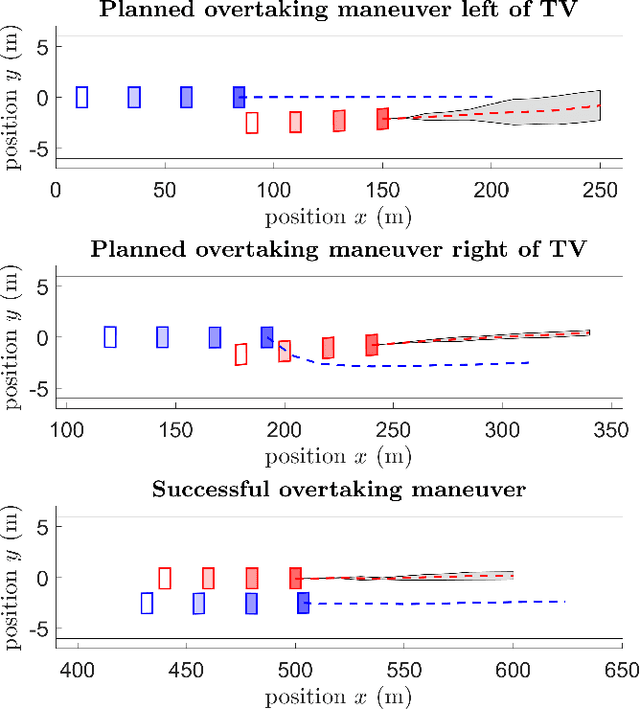
A fundamental aspect of racing is overtaking other race cars. Whereas previous research on autonomous racing has majorly focused on lap-time optimization, here, we propose a method to plan overtaking maneuvers in autonomous racing. A Gaussian process is used to learn the behavior of the leading vehicle. Based on the outputs of the Gaussian process, a stochastic Model Predictive Control algorithm plans optimistic trajectories, such that the controlled autonomous race car is able to overtake the leading vehicle. The proposed method is tested in a simple simulation scenario.
* This work has been accepted to the ICRA 2021 workshop 'Opportunities
and Challenges with Autonomous Racing'
View paper on