 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFvOR: Robust Joint Shape and Pose Optimization for Few-view Object Reconstruction
Paper and Code
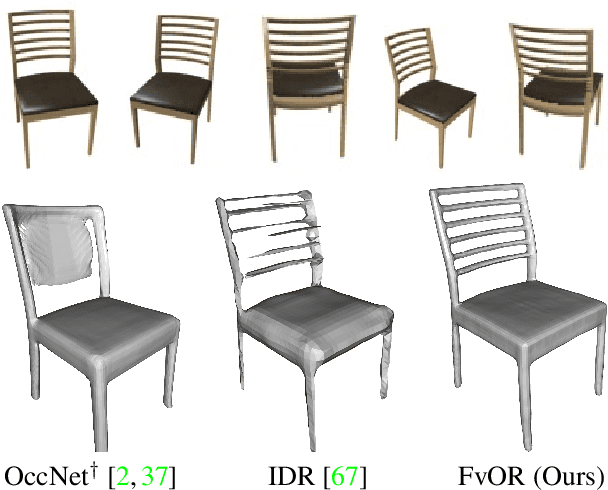
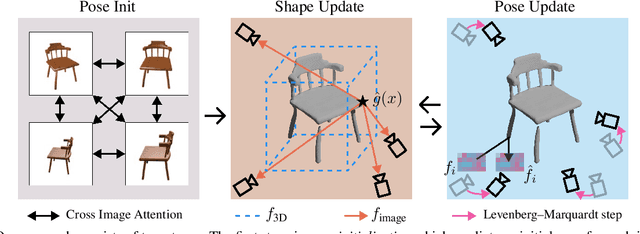
Reconstructing an accurate 3D object model from a few image observations remains a challenging problem in computer vision. State-of-the-art approaches typically assume accurate camera poses as input, which could be difficult to obtain in realistic settings. In this paper, we present FvOR, a learning-based object reconstruction method that predicts accurate 3D models given a few images with noisy input poses. The core of our approach is a fast and robust multi-view reconstruction algorithm to jointly refine 3D geometry and camera pose estimation using learnable neural network modules. We provide a thorough benchmark of state-of-the-art approaches for this problem on ShapeNet. Our approach achieves best-in-class results. It is also two orders of magnitude faster than the recent optimization-based approach IDR. Our code is released at \url{https://github.com/zhenpeiyang/FvOR/}