 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow: Architecture and Benchmarking for Reinforcement Learning in Traffic Control
Paper and Code

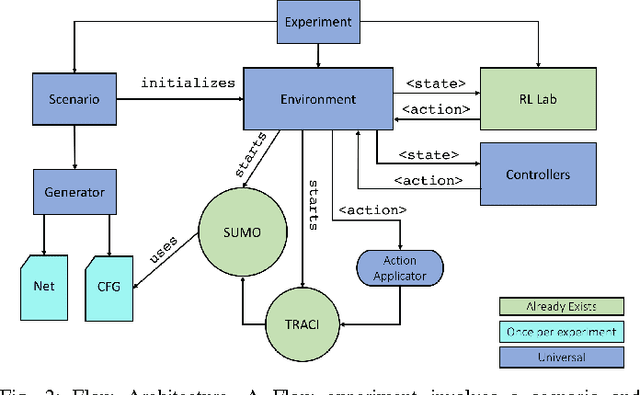

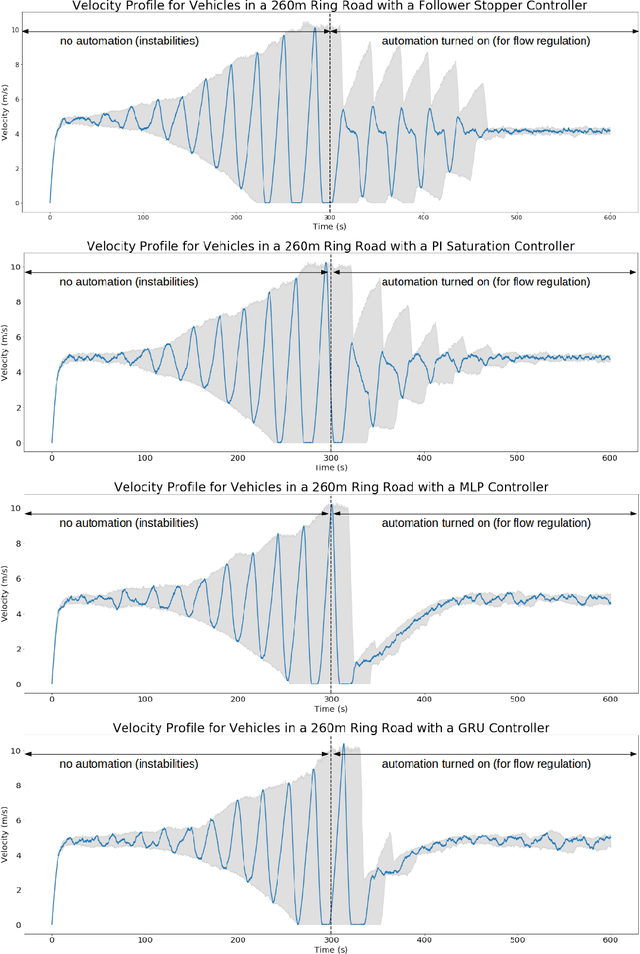
Flow is a new computational framework, built to support a key need triggered by the rapid growth of autonomy in ground traffic: controllers for autonomous vehicles in the presence of complex nonlinear dynamics in traffic. Leveraging recent advances in deep Reinforcement Learning (RL), Flow enables the use of RL methods such as policy gradient for traffic control and enables benchmarking the performance of classical (including hand-designed) controllers with learned policies (control laws). Flow integrates traffic microsimulator SUMO with deep reinforcement learning library rllab and enables the easy design of traffic tasks, including different networks configurations and vehicle dynamics. We use Flow to develop reliable controllers for complex problems, such as controlling mixed-autonomy traffic (involving both autonomous and human-driven vehicles) in a ring road. For this, we first show that state-of-the-art hand-designed controllers excel when in-distribution, but fail to generalize; then, we show that even simple neural network policies can solve the stabilization task across density settings and generalize to out-of-distribution settings.