 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Object Detection in Unseen Domains
Paper and Code
Apr 11, 2022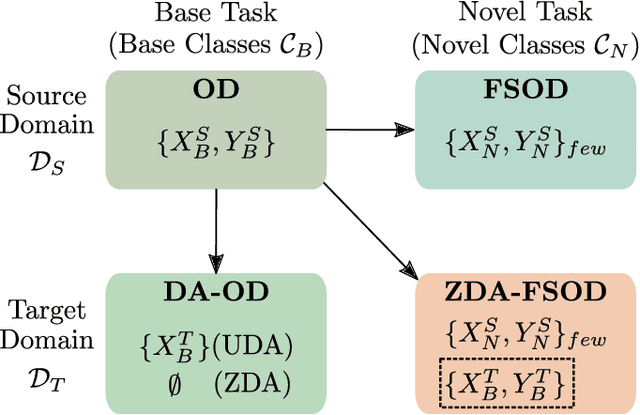
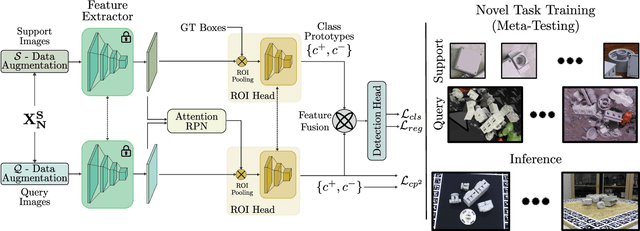
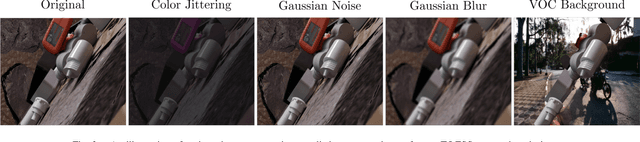
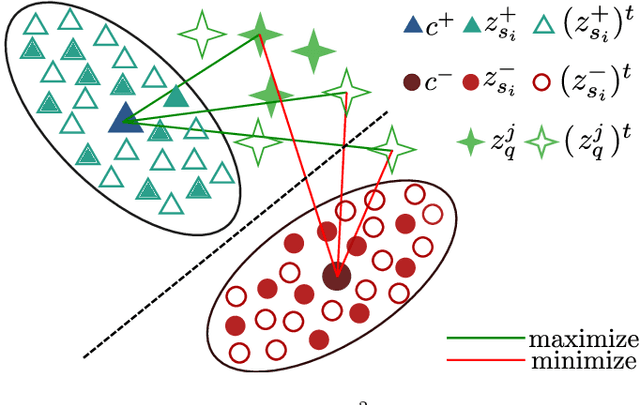
Few-shot object detection (FSOD) has thrived in recent years to learn novel object classes with limited data by transfering knowledge gained on abundant base classes. FSOD approaches commonly assume that both the scarcely provided examples of novel classes and test-time data belong to the same domain. However, this assumption does not hold in various industrial and robotics applications (e.g., object grasping and manipulation), where a model can learn novel classes from a source domain while inferring on classes from a different target domain. In this work, we address the task of zero-shot domain adaptation, also known as domain generalization, for FSOD. Specifically, we assume that neither images nor labels of the novel classes in the target domain are available during training. Our approach for solving the domain gap is two-fold. First, we leverage a meta-training paradigm, where we learn domain-invariant features on the base classes. Second, we propose various data augmentations techniques on the few shots of novel classes to account for all possible domain-specific information. To further constraint the network into encoding domain-agnostic class-specific representations only, a contrastive loss is proposed to maximize the mutual information between foreground proposals and class prototypes, and to reduce the network's bias to the background information. Our experiments on the T-LESS dataset show that the proposed approach succeeds in alleviating the domain gap considerably without utilizing labels or images of novel categories from the target domain.